Seit vielen Jahren sind die Gleise und Weichen der Firma Roco (Roco Line) bei mir ohne irgendwelche Probleme oder Schwierigkeiten im Einsatz. Gerade die Weichen sind sehr robust und sehr fahrsicher.
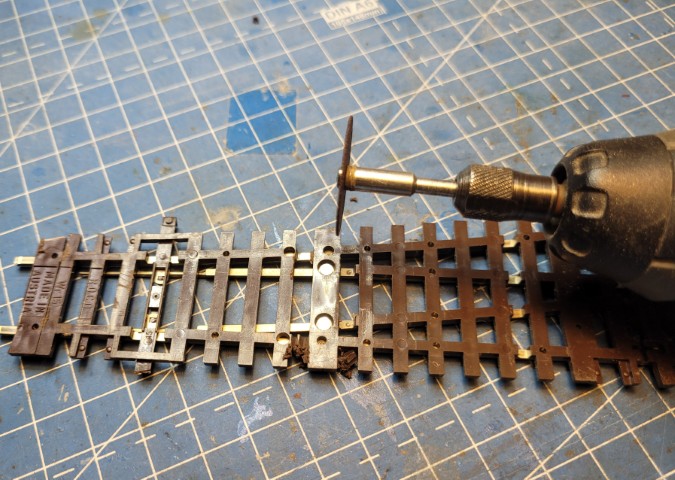
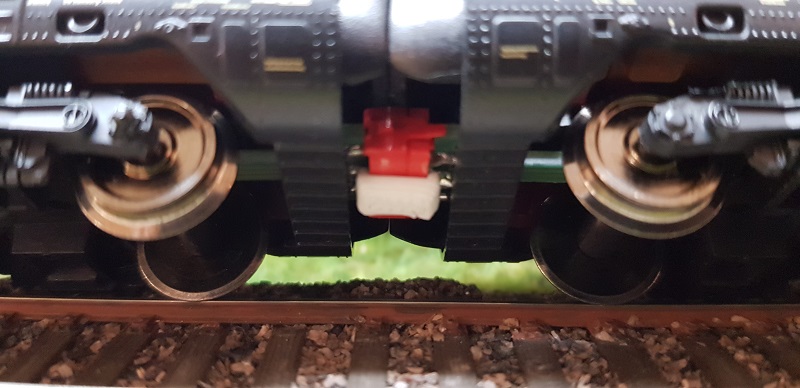
Allerdings haben die Weichen ein Problem, welches ihr hier im Bild seht: Die Stromverbindung der Zungen zum Herzstück hin (Flügelschienen) wird über Drehzapfen (grüne Pfeile) geregelt. Im laufende der Jahre kann dies schnell zum Problem werden, wenn diese Zapfen ausleiern.
Auch wenn ihr die Schienen aufklebt, können hier Klebereste schnell zu Spannungsverlust führen. Wenn dann die Weiche in der hintersten Ecke eingebaut ist und mühsam wieder ausgebaut werden muss, steigt die Frustrate massiv an – nicht gerade unserem schönen Hobby förderlich…
Um die Spannungsversorgung von Roco Line Gleisen dauerhaft sicherzustellen, muß eine zusätzliche Stromzufuhr für die Weichenzungen und Flügelschienen nachgearbeitet werden.
Hierfür reicht ein Auffräsen der Verbindungsstege mittels Drehmel1notfalls geht es auch mit einem Cutter. Wichtig ist, dass ihr die Stege an den hier gezeigten Stellen auffräst.
Danach mit einer Feile (notfalls auch mit dem Drehmel) das Gleisprofil aufrauhen, damit wir später einen guten Lötfluss haben. Das Löten findet bei 400 Grad statt – achtet aber darauf nicht zu lange auf dem Profil zu löten, damit der Kunststoff nicht zu Schaden kommt!
Sehr hilfreich ist hierbei, wenn ihr Löthonig verwendet – damit vermeidet ihr auch zu lange Lötzeiten:
Roco Line neu verschaltet
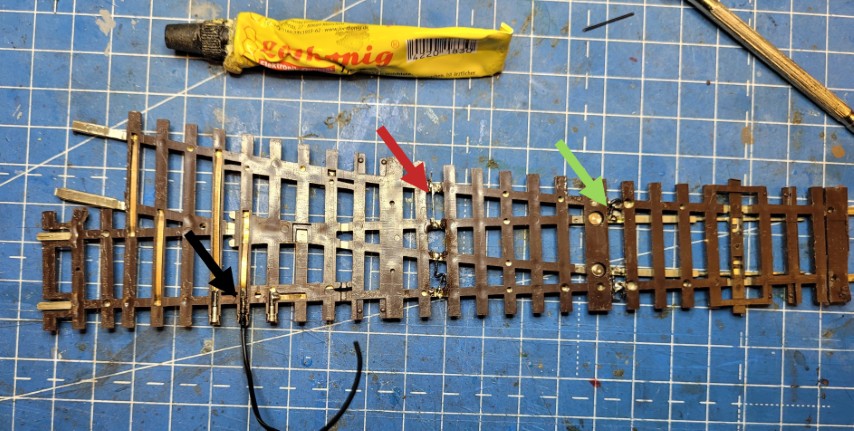
Im Bild oben ist am grünen Pfeil die Zunge mit der Aussenschiene verbunden worden. Achtung: Hier auf jeden Fall biegsame Litze verwenden, da die Zungen sich ja später noch bewegen sollen! Am roten Pfeil können wir dagegen problemlos die Flügelschienen direkt mit den Aussenschienen verlöten. Für die Herzstückpolarisierung (schwarzer Pfeil) wird bei dieser Gelegenheit auch gleich der Anschluss hergestellt – ich löte dazu allerdings vorher die kleinen Zapfen ab, da eine gelötete Verbindung hier viel dauerhafter hält.
Die Kontaktbleche lasse ich hier dran, da ich die anschliessenden Schienen eh nochmal direkt mit Kabelanschluß versehe. Im Laufe der Zeit lösen sich leider auch diese Kontaktbleche schnell mal. Falls ihr also direkt nach der Weiche einen Kunststoffschienenverbinder verwendet, solltet ihr auch die Kontaktbleche durch eigene, gelötete Verbindungen ersetzen.
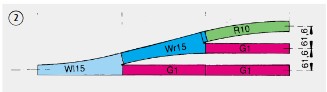
Kommen wir noch zu einem zweiten Ärgernis: Dem Parallelgleisabstand. Gemäß Norm sollte dieser auf gerader Strecke 46mm betragen.
Die Roco Line Gleisgeometrie hat einen Parallelgleisabstand von 61,6 mm.
Wer nun in einem Schattenbahnhof möglichst viele Gleise unterbringen will, hat jetzt ein Problem, da er viel Platz verschenkt.
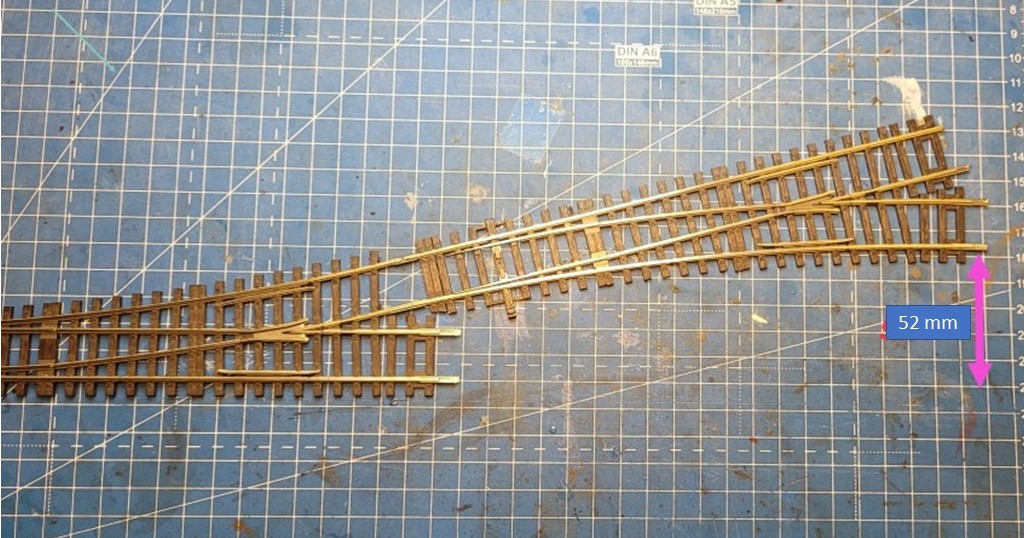
Die Lösung ist eine Verkürzung der Weiche, was auch zu einer Verkürzung des Parallelgleisabstands auf 52 mm führt. Rechts im Bild eine derart verkürzte Weiche WL15
Dazu sei allerdings gesagt, dass man im Untergrund oftmals auch etwas mehr Platz benötigt, wenn man sehr viele parallele Gleise nebeneinander hat und auch noch mit den Fingern dazwischen kommen muss. Das ist aber eher bei vielen Gleisen und bei nicht einsehbaren Schattenbahnhöfen relevant.
Um die Weichen zu verkürzen, kommt auch wieder der Dremel zum Einsatz. Hilfreich ist dabei ein Geodreieck, um wirklich gerade, parallele Schnitte zu erstellen. Eine Gleissäge ist da auch hilfreich. Wie ihr auf dem Bild oben seht, habe ich die Doppelschwelle am Schluss noch auf das Profil aufgeschoben. Um die Schienenverbinder einschieben zu können, muss entsprechend Abstand zwischen Schienenende und erster Schwelle sein.
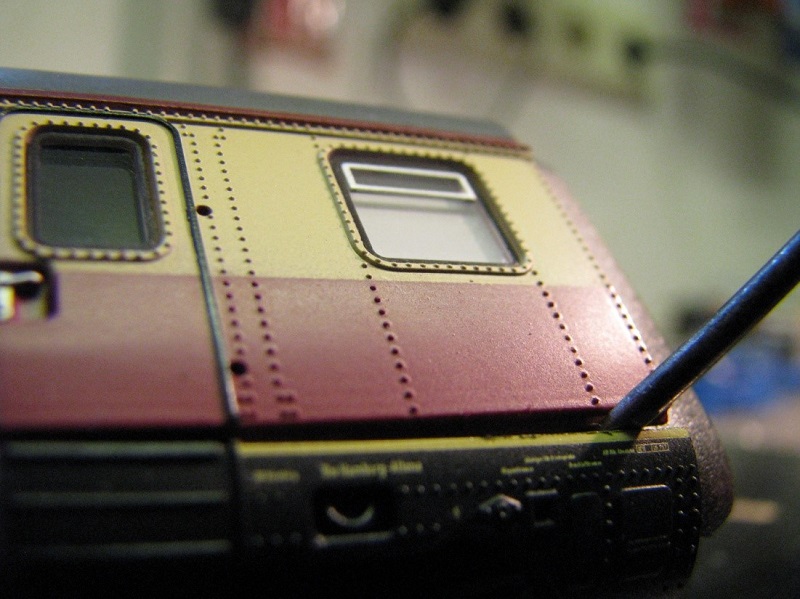
4yg – so heißen die Umbauwagen der frühen DB die in der Epoche IIIa durch Umbau anderer Wagen entstanden. Vom Umbau – genauer gesagt vom Einsatz gebrauchter Fahrzeuge auf der Anlage will ich euch hier einmal berichten.
Manchmal sieht man mich durchaus auf Modellbahnbörsen – und was wäre eine solche Börse, ohne dass man nicht auch das Ein- oder Andere „Schätzchen“ dort ergattert. So hatte ich letztens wieder das Vergnügen und konnte mich eines Pärchens von 4yg-Personenwagen der Firma Roco aus den späten 80er Jahren nicht erwähren.
Da die Puffer und Zurüstteile gefehlt hatten, konnte ich die beiden auch noch sehr günstig erstehen. Aber was mache ich mit 2 Neuzugängen?
Die Erfahrung mit solchen alten Schätzchen hat mich gelehrt, diese immer erst einer genaueren Untersuchung zu unterziehen, bevor diese auf der Anlage ihrer Runden drehen dürfen. So können Entgleisungen und unliebsame Überraschungen vermieden werden.
Hier mal meine Vorgehensweise – nicht alles davon müsst ihr beachten, denn nicht jeder patiniert seine Wagen oder verwendet eine Innenbeleuchtung.
Konkret habe ich folgende Vorgehensweise:
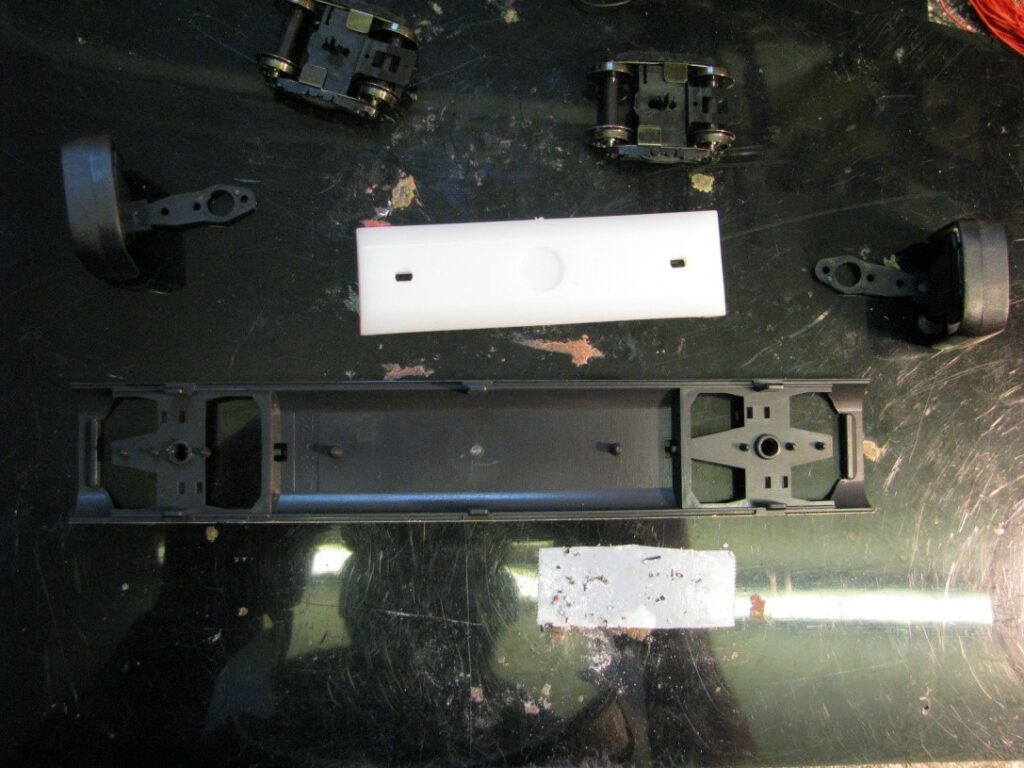
Zerlegung des Fahrzeugs in die Einzelteile
Überprüfung von Radsätzen und Drehgestellen
Farbgebung von Inneneinrichtungen bei Personenwagen anpassen
Personenwagen mit LED Innenbeleuchtung versehen
Personenwagen um Figuren erweitern
Kupplungen justieren
Wagen auf der Anlage testen
Erweiterungssätze hinzufügen z.B. Griffstangen
Abschlusspatinierung
Dokumentation und Integration in die Steuerungssoftware
Vor Einsatz gebrauchter Wagen und Fahrzeuge auf der Anlage, empfiehlt sich eine genaue Untersuchung, Reinigung und Optimierung der Fahrzeuge.
Zerlegung
Am Anfang zerlege ich die Fahrzeuge in ihre Bestandteile. Bei Güterwagen ist dies in der Regel nicht erforderlich – außer diese sollen auch patiniert werden. Wohl aber bei Personenwagen. Dabei werden oft schon erste Problemfelder wie fehlende Rastnasen oder defekte Radsätze sichtbar.
Wie die Zerlegung funktioniert habe ich schon beim Artikel über LED Streifen gezeigt1übrigens auch mit einem 4yg. Wichtig: Beschriftet die Seiten und Teile für den späteren Zusammenbau! Auch wenn die Teile gleich ausschauen, unterscheiden sie sich z.B. die Fensterfronten oder die rechte und linke Seite! Markiert euch auch, ob das Dach links oder rechts aufsitzt, und ob die Sitzbänke links oder rechts sind.
Radsätze
Nur selten hat man ein unbenutztes Modell ersteigert – meist sind die Radsätze verschmutzt, und müssen als erstes gereinigt werden. Ich nutze dazu einen Ultraschallreiniger mit Reinigungsflüssigkeit2Octopus Ultraschallreiniger Konzentrat . Hartnäckiger Schmutz muss allerdings später doch noch mit Isopropylalkohol entfernt werden – je nach Bohrmaschine lassen sich die Radsätze auch in einen Bohrkopf einspannen, was die Reinigung natürlich wesentlich vereinfacht. Bitte kein Schleifpapier verwenden oder maximal 800er!
Nach der Reinigung werden die Radsätze gesichtet. Auch prüfen, ob sich u.U. die Radsätze verschieben lassen. Im Bild seht ihr sowohl oben einen Radsatz der sich frei auf der Achse bewegen lässt, als auch links einen Radsatz dessen Radreifen sich einfach ablösen lässt. Deshalb müssen wir die Radsätze aber nicht wegwerfen – das lässt sich alles reparieren.
Defekte Radreifen klebe ich mittels Sekundenkleber. Jedes Rad wird danach mittels Messlehre auf Einhaltung des „Radsatzinnenmaß“ geprüft. Wie schon weiter vorne beschrieben sind das bei mir genau 14,6 mm. Mittels eines Schraubstocks lassen sich die Räder genau justieren. Räder die nicht absolut fest sitzen erhalten an der Achse einen Tropfen Sekundenkleber – danach sitzt das Rad bombenfest auf der Achse.
Innenräume und Patina
Nach den Achsen kommt die Airbrush zum Einsatz – zum Thema Patina muss ich mal bei Gelegenheit was schreiben. Da bin ich allerdings auch selbst nicht so der Meister drin – einige Hinweise dazu finden sich aber auch im Bericht zur Beladung von Güterwagen.
Ganz oben auf dem Bild habt ihr gesehen, dass die Inneneinrichtungssätze von Roco damals ein absolut grauenhaftes Ei-dottergelb aufwiesen. Das stimmt aber nun wirklich überhaupt nicht mit der Realität überein. Tatsächlich waren die Innenräume in einem braunen Holzton mit roten Sitzbezügen.Hier muss man nicht zu genau sein – nachher sieht man nicht mehr allzu viel von den detaillierten Arbeiten – wichtiger ist die Wagen auch gleich mit einigen Reisenden zu bevölkern – in Epoche IIIa gab es noch viele Menschen die mit der Bahn fuhren!
Die Dächer und auch die Verschmutzung der Außenhaut wurde bei der Gelegenheit natürlich auch gleich mit gemacht – davon aber wie gesagt später einmal mehr.
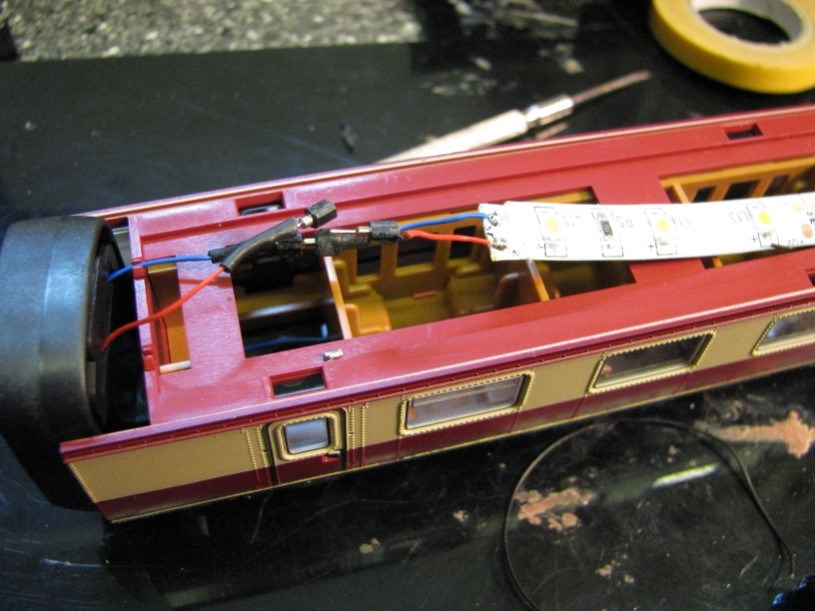
Beleuchtung
Wie ich mittels LED Streifen meine Wagen beleuchte, habe ich ja schon an anderer Stelle beschrieben. Und es kommt kein Wagen auf der Anlage zum Einsatz, ohne auch gleich die passende LED Beleuchtung mit verpasst zu bekommen. Von Roco gab (und gibt es hoffentlich auch noch) die hier gezeigten Kupferstreifen. Die sind eigentlich für die s.g. Hechte von Roco. Aber wenn man eine Rastnase am Drehgestell abbricht, welches für die Originale vorgesehen waren (die habe ich nämlich nicht mehr im Handel gefunden), dann kann man auch diese Streifen hier verwenden.
Ich verwende immer ein Drehgestell für die Aufnahme eines Pols. Daher muss ich nur ein Kabel nach innen ziehen. Bei den 4yG geht dies ideal mit einem 1mm Bohrer mit dem man durch den Zapfen des Drehgestells bohrt.
Die 4yg haben 2 Toiletten, in welchem wir 2 x 500 uF Stützkondensatoren unterbringen können. Dazu müssen die Toiletten ein wenig „aufgebohrt“ werden um die Kondensatoren aufnehmen zu können. Die Fenster waren früher satiniert – es reicht also weißes Papier ans Fenster zu kleben. So sind dann auch die Kondensatoren nicht mehr sichtbar.
Verschaltung und Anschluss der LED Streifen findet ihr in diesem Bericht.
Ersatzteile
Die Puffer der 4yg müssen allesamt fixiert werden – die fallen nämlich schon bei purem Anschauen heraus. Ich verwende dazu UHU Kraft Flex und Clean, der transparent austrocknet. Leider gibt es ihn wohl nicht mehr vom Hersteller3 – UHU Flextube ist wohl der Nachfolgerkonnte ich aber selbst noch nicht ausprobieren – meiner reicht noch :-). Die fehlenden Puffer habe ich mittels 3D Drucker nachgedruckt – bei Interesse gerne melden.
Auch die Griffstangen werden bei der Gelegenheit mit nach gearbeitet
Maß halten
Zu guter Letzt solltet Ihr noch das Höhenspiel der Kupplungen prüfen. Einige Wagen habe ich mit Starrkupplungen ausgerüstet – der größte Teil ist aber trennbar mit Kadee Kupplungen ausgestattet. Die Lehre ist selbst gebaut – erfüllt aber ihren Zweck4und wer genau hinschaut, sieht, dass sich hier noch ein 3yg dazwischen gemogelt hat...
Einsatz
Zum Schluss geht es zum Einsatz auf die Anlage. Auch hier muss der Wagen erstmals seine Runden drehen und auch die schwierigen Passagen, wie das Zurück drücken im Schattenbahnhof, bestehen. Dabei habe ich dann auch noch zu kurze Kupplungen gefunden oder zu dicke Puffer, welche sich verhakt haben. Aber die beiden Schätzchen sind jetzt im Verbund mit den schon vorhandenen 4yg echt original anzuschauen – schaut selbst:
gealterter Umbauwagen 4yg
Nacharbeiten
Wer will, kann jetzt noch zusätzliche Patinierung und Farbgebung an den Wagen durchführen. Ich mache das immer erst nach etwas längerem Einsatz und verwende dazu Trockenfarben.
Ebenfalls erhalten bei mir alle Wagen eine laufende Nummer und müssen auch in die Steuerungssoftware (Traincontroller) übernommen werden. Die laufende Nummer wird einfach mit einem kleinen Papierrest unter den Wagen geklebt.
Artikel aktualisiert am 24.02.2023 Diese Beschreibung bezieht sich auf die Version 3.2.0 der MobaLEDLib und Hardware Version 1.1 der Schaltplatine. Aktualisierung um Erfahrungen nach längerem Betrieb (siehe unten).
Nachdem ich schon über meine ersten Erfahrungen mit DCC gesteuerten RGB-LEDs und über DCC gesteuerte Servos berichtet hatte, möchte ich euch diesmal von meinen Erfahrungen mit der DCC Relaisplatine des MobaLEDLib Projektes berichten.
Hintergrund
Für ein neues Modul (Schmalspurbahnhof Karnsdorf) benötigte ich eine Herzstückpolarisierung der Weichen – außerdem hat das neue Modul eine Segmentdrehscheibe die mittels Spannungsumpolung arbeitet. Da kam es gut, das es für die MobaLEDLib inzwischen ein Relaismodul – Modul 530 – mit 8 Relais gibt, die jeweils 1xUM schalten. (Wer mit dem Thema MobaLEDLib noch gar nichts anfangen kann dem empfehle ich meinen Artikel zur LED Steuerung)
Ein solches Modul kostet mit den Elektronikbauteilen ca. 20€ und man kann mittels DCC Kommandos jedes einzelne Relais schalten! Die teuersten Teile sind dabei die Relais mit ca. 1,50€ pro Relais. Zum Vergleich: Die Firma TAMS hat einen Schaltdecoder zum Selbstlöten mit nur 4 Relais im Angebot (Schaltdecoder SD-34) zum Preis von 34,95 €!
Vor allem aber waren für mich die bisherigen, sehr guten Erfahrungen mit allen Platinen der MobaLEDLib ein Grund, es einmal mit dieser Platine auszuprobieren.
Um es vorwegzunehmen: Die Platine funktioniert problemlos – allerdings musste ich einiges an Lehrgeld bezahlen und hoffe das euch diese Beschreibung hilft nicht in die gleichen „Fettnäpfchen“ zu tappen. Müsste ich für mich ein Schwierigkeitsgrad beim Bau definieren, so käme allerdings die Relaisplatine auf den höchsten Grad, gefolgt von der Servoplatine und der LED Hauptplatine mit dem niedrigsten Schwierigkeitsgrad.1diese persönliche Einstufung hängt aber vornehmlich von meinen Kenntnissen des Lötens von SMD ICs ab
Folgende Beschreibungen waren bei dem Arbeiten mit der Relaisplatine hilfreich:
Beachtet: Einige der Links sind versionsabhängig – deshalb bitte immer über die in obiger Liste als erstes genannte Einstiegsseite gehen und dann dort die genannten Links suchen!
Auch wenn ich im folgenden eine Herzstückpolarisierung beschreibe, können die Relais natürlich für jede andere Schaltaufgabe verwendet werden. Die Beschreibung ist auch in diesem Falle hilfreich, da es vornehmlich um Aufbau und Betrieb der Relaisplatine geht.
Bestellung und Varianten
Wie immer findet sich die Beschreibung der Relaisplatine 530 im MobaLEDLib Wiki. Dabei hatte ich allerdings gleich das erste Problem:
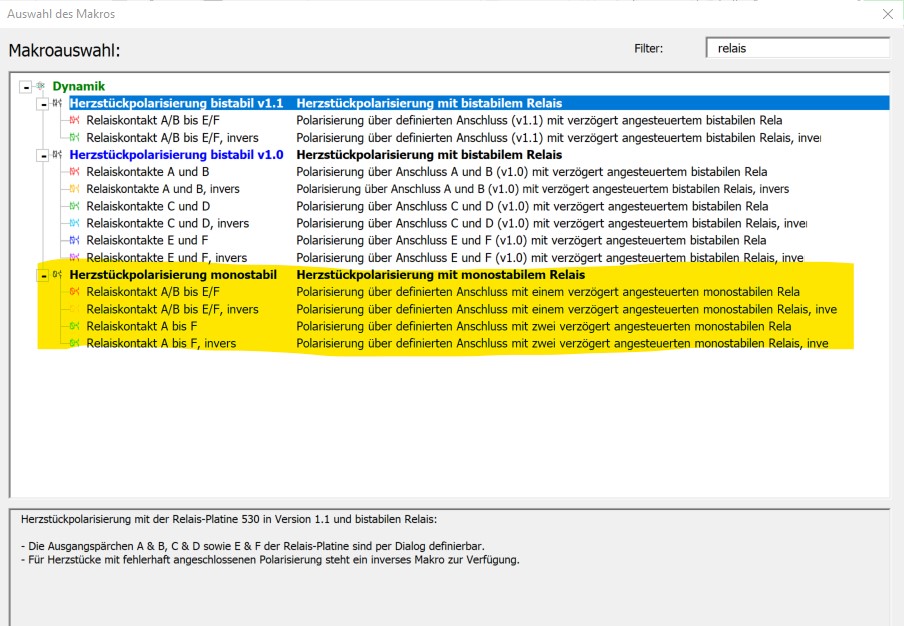
Es gibt 3 unterschiedliche Möglichkeiten die Platine zu bestücken – entweder als Platine zur „Herzstückpolarisation“ – ich nenne es mal (RH), oder als Relaisplatine (RE) oder als ABC Bremsmodul (RA) . Außerdem kann man RE mit monostabilen Relais 1A, monostabilen Relais 2A und bistabilen Relais 2A bestücken. Hier mal die Übersicht, wie sich RE bestücken lässt:
Relaiskonfiguration
Typ
Anzahl
Bemerkung
Monostabil
1A wie im Wiki beschrieben
8
8 Relais können geschaltet werden, davon 7 unabhängig.
Höhere Amperezahlen möglich – bei stromintensiven Verbrauchern notwendig
Bistabil
2A bei den Relais handelt es sich um diese hier mit zwei Spulen
3
Nur kurze Schaltspannung erforderlich um das Relais umzuschalten – Zustand bleibt auch bei Abschaltung MLL bestehen. Daher auch z.B. manueller Betrieb bei Herzstückpolarisierung möglich.
Bestückungsvarianten in der Konfiguration als Relaisplatine
Diese unterschiedliche Bestückungsvarianten ermöglichen zwar einen sehr variablen Einsatz der Platine – als Anwender verwirren sie mich aber doch ziemlich.
Hier mal eine Übersicht was es mit den verschiedenen Relais auf sich hat:
Monostabiles Relais – man gibt einen DCC Befehl ein und das Relais schaltet ein. Stellt es euch wie einen Taster vor: Mit dem DCC Befehl wird der Taster aktiviert. Das Relais zieht an und schaltet durch. Wie bei einem Taster muss aber in angezogenem Zustand dauerhaft Strom fließen. Schaltet ihr die Anlage ab, so ist das Relais wieder abgefallen und muss jedes Mal neu aktiviert werden2(dafür gibt es eine Lösung – dazu aber später mehr)
Bistabiles Relais – auch das funktioniert mit einem DCC Befehl, aber das Relais schaltet nur einmal um und bleibt danach in Ruhe, d.h. es fließt nach dem Umschalten kein Strom. Schalt-technisch sind beide Relais identisch
Verwirrend ist hier, dass es auch eine extra Bestückung in der Variante RH – also als Platine zur Herzstückpolarisation gibt. Diese ist insbesondere dann empfohlen, wenn MLL auch mit den MLL Servomodulen (siehe mein Bericht zu den Servomodulen) zum Einsatz kommt und gleichzeitig Weichen mit durchgehenden Zungen.
Nun wollte ich allerdings nicht nur die Polarisation verwenden, sondern auch eine Umpolung für eine Segmentdrehscheibe. Auch erlaubt die Herzstückpolarisation nur 3 bistabile Relais – die Relaiskonfiguration aber erlaubt 8 monostabile Relais.
Also dachte ich: 8 ist mehr als 3 und mit 8 monostabilen kriegt man ja auch eine Polarisierung hin!
Entsprechend habe ich auch die Bauteile bestellt die unter dem Link für die „Relaisversion“ zu finden sind. Da gab es aber gleich folgende Probleme (vielleicht gibt es ja irgendwann keine Lieferprobleme mehr):
Die ICs vom Typ ULN 2003A AN waren bei Reichelt bis auf weiteres nicht mehr lieferbar. Wie der Entwickler – Dominik – mir bestätigt hat, kann man aber auch die ULN 2003A STM nehmen.
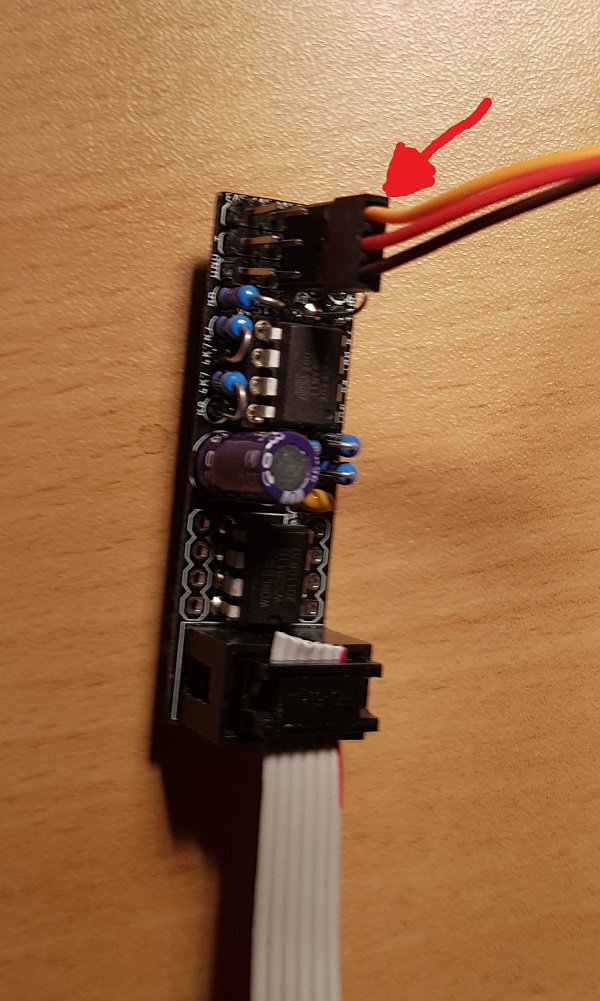
Ebenfalls kann Reichelt aktuell keine steckbaren Schraubklemmen liefern. Die sind aber für die Funktion auch nicht erforderlich. Hier kann man sich mit einfachen Stiftleisten aushelfen. Dann kommen auf die Stifte entsprechende Stiftbuchsen – genau so wie man auch Servos anschließt. (siehe dazu mein Modul oben). Die Stiftleisten sind aber nicht Teil des Warenkorbs, da die Standardbestückung die Schraubklemmen vorsieht.
Der Warenkorb alleine reicht nicht aus – es fehlen die Wannenstecker und vor allem die WS2811 in SMD Bauform! Letzter sind nur schwierig zu bekommen – fragt am Besten mal bei der Bestellung der Platinen, ob ihr noch 2 SMD WS2811 dazu bestellen könnt – manchmal haben die Kollegen noch welche vorrätig.
Zusammenbau und Test
Der Zusammenbau ist eigentlich problemlos möglich. Allerdings stehe ich selbst wohl auf Kriegsfuß mit SMD IC Bauteilen. So funktionierten anfangs nur die ersten beiden Relais – und eine kalte Lötstelle tat ihr übriges. Zum Glück hat mir der Entwickler, Dominik, hier geholfen und das Bord nach Einsendung an ihn, repariert!
Einige Empfehlungen zum Löten von SMD Bauteilen findet ihr in meinem Artikel zu den Infrarot Sensoren3(obwohl ich meine eigenen Tipps eingehalten hatte, hat es allerdings bei mir nicht funktioniert – aber dazu brauche ich wohl erst eine neue Lötstation – die alte Lötstation ist doch langsam fällig …)
Vergesst nicht die Lötpunkte richtig zu setzen!
Da es so viele Varianten gibt, war ich anfangs irritiert, welche Lötpunkte ich denn jetzt für mein „Standardrelais mit 8 monostabilen Relais“ verbinden musste. Hier hat mir (wie immer) der Blog im Stummiforum aus der Patsche geholfen. Dazu folgende Rahmenbedingungen:
Wenn ihr eure Platine immer mit einer Verteilplatine anschließt, 8 Monostabile Relais mit 1A verwendet, keine höhere Spannung über Pin 6 einspeist und die Platine als reine Relaisplatine verwendet4(das sind jetzt alles die „Standardbedingungen“) , dann müssen folgende Lötpunkte (aka Jumper) verbunden werden5wer es genau wissen will findet hier den Thread mit einem Bild der Lötpunkte:.
RES_G1
NO_OPTW2
TERM (nur offen lassen, wenn man mehrere Relaisplatinen miteinander verbinden will – davon würde ich aber die Finger lassen und stattdessen jede Relaisplatine an einen eigenen Anschluß einer Verteilerplatine anschließen)
6=5V (nur offen lassen, wenn man eine abweichende Spannung am Verteiler von PIN 6 hat – also eher etwas für die „Insider“)
Dieser Beitrag bezieht sich auf V1.1 der Relaisplatine -wenn ihr eine andere Version verwendet, solltet Ihr unbedingt erst vorher die Dokumentation im MobaLEDLib Wiki zu Rate ziehen!!
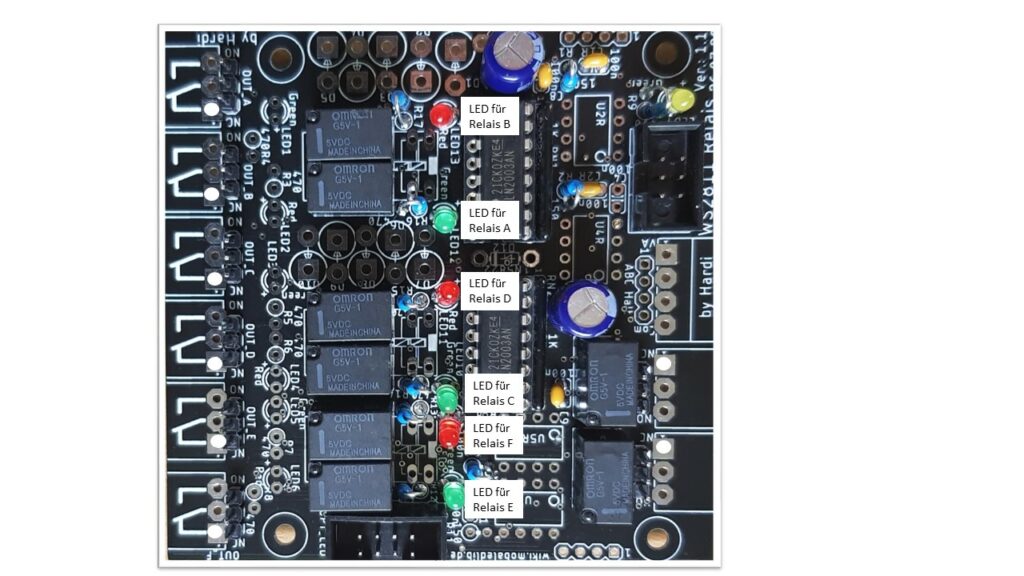
Die LED und die 8 Relais sind dabei wie folgt angeordnet:
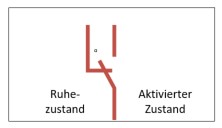
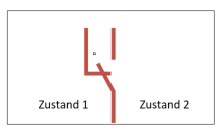
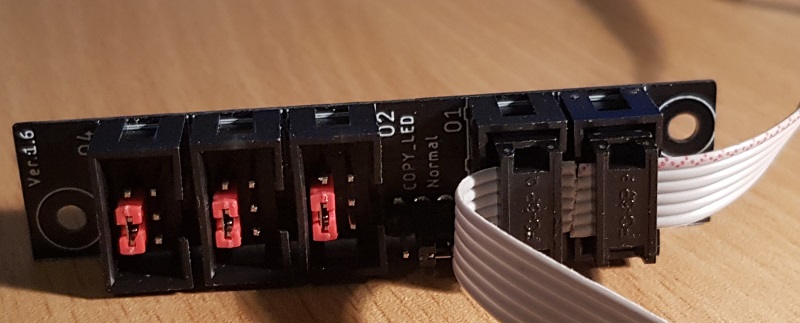
Steuerplatine 530 (Version ohne Schraubklemmen) – der weiße Punkt markiert den Pin der im Ruhezustand aktiviert ist. Nur für die ersten 6 Relais sind LED vorhanden. Relais 8 (H) schaltet zusammen mit Relais 6 (F).
Da die Pins nicht verpolungssicher angeordnet sind, habe ich jeden Stecker mit einer Markierung versehen – der 1. Stecker hat zusätzlich 1 Punkt als Markierung – der 8 Stecker 8 Punkte.
Testen der Platine
Mein erster Test ging gründlich in die Hose. Um es gleich vorwegzunehmen:
Vor dem Test der Platine solltet Ihr den Programmgenerator der MLL (also die Exceldatei) auf die neueste Version aktualisieren. Dabei auch nicht vergessen, den DCC Arduino mit zu aktualisieren, falls eine neue Version vorhanden ist.
Das Hauptproblem war mein fehlender Kenntnisstand zur Konfiguration der monostabilen Relais im Programmgenerator der MLL. So fand ich in der V3.1.0 netterweise folgende Konfigurationsoption:
MobaLEDLib – Relaisdarstellung V3.1.0
Toll – dachte ich, aber weit gefehlt – diese Konfiguration ist nur für den Fall gedacht, das man die Herzstückpolarisations-Variante RH gebaut hat – nicht aber für die Version RE!
Wie immer war das Forum sehr hilfreich – vor allem nachdem ich erst einmal verstanden hatte, das man auch die monostabilen Relais als Dauerkontakt oder als Momentkontakt konfigurieren kann. Dazu ein kurzes Beispiel:
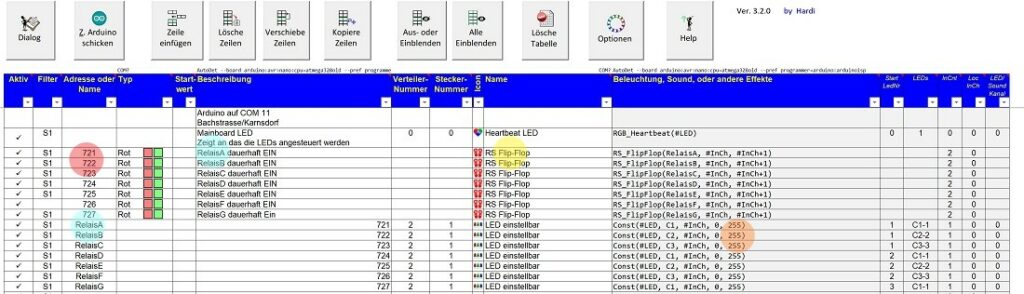
Ein Herzstück möchte ich dauerhaft mit Strom versorgen – dann brauche ich aber auch ein Kontakt der dauerhaft eingeschaltet ist. Einen magnetischen Weichenantrieb sollte ich aber nur kurzzeitig unter Spannung setzen – selbst wenn dieser eine Endabschaltung haben sollte. In der Dokumentation ist aber (zumindest zum Zeitpunkt dieses Artikels) nur der Momentkontakt beschrieben – nicht aber der Dauerkontakt! Der Entwickler – Dominik – hat mir dann schnell aus der Patsche geholfen. Hier meine Konfiguration – ich verwende die Adressen 721 – 727 um die Relais einzuschalten.
Konfiguration MobaLEDLib mit monostabilen Relais
Mittels RS Flip-Flop (gelb markiert) wählt ihr aus, das ein Relais dauerhaft eingeschaltet wird. Wollt ihr nur ein kurzes Einschalten, so lasst ihr das RS-Flip-Flop einfach weg.
Die DCC Adresse (rot markiert) wird bei der Eingabe des Flip-Flop – nicht beim Relais angegeben.
Der Name des Relais (blau markiert) bei der Definition des RS Flip-Flop muss mit dem Namen dem Relaisnamen übereinstimmen (sofern das Relais dauerhaft geschaltet bleiben soll)
Vergesst auch nicht, das die Helligkeit (orange) zwingend auf 255 gesetzt werden muss – dies ist im Dialog beim Einrichten leider nicht der Standardwert.
Herzstückpolarisierung
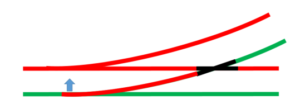
Die Herzstückpolarisierung funktioniert auch mit monostabilen Relais – es ist nur ein wenig aufwändiger in der Verkabelung und der Konfiguration in eurer Steuerungssoftware. Wenn ihr nur das Herzstück selbst, und nicht die Zungen, umschalten wollt, dann könnt ihr einfach eines der Relais verwenden und einfach die Spannung in Abhängigkeit von der Weichenstellung umstellen. Das ist aber bei 2L Fahrern und Weichen mit federnden Zungen nicht ganz so einfach. Solche Weichen werden z.B. von Tillig, Weinert usw. hergestellt.
Bei Weichen mit federnden Zungen, wird die Stromverbindung über das Anlegen der Zunge hergestellt. Wenn die Weichenzunge umgelegt wird, und gleichzeitig umgepolt wird, so kommt es zum Kurzschluss
Wer nun denkt: Da braucht man doch keine Polarisierung – man muss ja nur Herzstück mit Zunge verbinden hat vollkommen Recht! Aber: Die Zunge liegt nicht immer vollständig an – hinzu kommt nach dauerhaftem Betrieb eine Verschmutzung was dauerhafte Reinigung der Zungeninnenseite nach sich zieht.
Federnde Zungen in Weichen solltet ihr immer mit einer eigenen Stromversorgung versehen, um einen dauerhaft störungsfreien Betrieb zu garantieren!
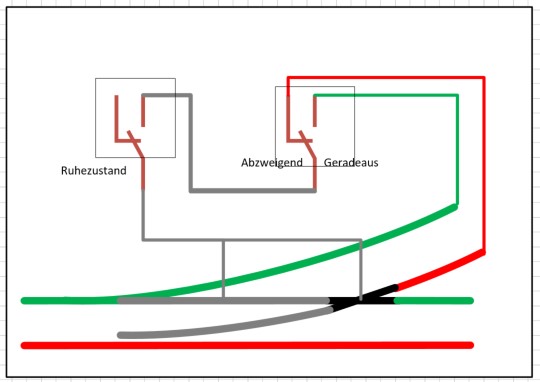
In der MLL gibt es daher auch die Möglichkeit die Herzstückpolarisierung mit dem Schalten der Servos zu koppeln, sodass erst bei Bewegung des Servos die Polarisierung umgeschaltet wird. Nun habe ich allerdings meine Weichen nicht mit dem Servobaustein geschaltet – aber generell würde ich dies auch nicht unbedingt empfehlen. Deshalb kommt bei mir folgende Schaltung zum Einsatz
2L Herzstückpolarisierung bei federnden Weichen
Die Schaltung zeigt die Relais im stromlosen Zustand. Dabei ist das Herzstück ohne Verbindung zu einer der Schienen. Tatsächlich kann es trotzdem Verbindung haben, wenn die Zunge Verbindung zum grünen Gleis hat! Diese Einstellung führt aber garantiert nicht zu einem Kurzschluss.
Um jetzt die Weiche zu schalten, wird als erstes das Relais 1 in Ruhezustand gebracht, dann wird die Weiche geschaltet und die Zungen laufen um. Erst danach schaltet Relais 2. Ein bistabiles Relais würde diese Verbindung dauerhaft halten. Diese Abfolge übernimmt die Steuerungssoftware (in meinem Falle Traincontroller). Wie dies konkret in der Software ausschaut – dazu das nächste Kapitel
Konfiguration Steuerungssoftware
Die folgende Beschreibung bezieht sich auf die bei mir eingesetzte Steuerungssoftware Traincontroller. Bei anderen Steuerungsprogrammen, ist dies natürlich anders zu definieren – trotzdem mag diese Beschreibung hier vom Grundsätzlichen auch für diese Programme interessant sein.
Halten wir uns noch einmal vor Augen, wie jetzt die Herzstückpolarisierung (am Beispiel von Relais A und Relais B funktioniert:
Wenn ich Relais A aktiviere, deaktiviere (!) ich damit auch die Herzstückpolarisierung6 Ich hätte es auch anders herum machen können, aber dann wäre Relais A bei Betrieb der Anlage dauernd aktiv gewesen. Ist Relais A eingeschaltet, so ist auch das Herzstück nicht mit Strom versorgt. Tatsächlich habe ich allerdings u.U. über die Weichenzungen eine Verbindung – die allerdings nicht sehr kontaktsicher ist. Ich habe mir daher folgende Vorgehensweise in Traincontroller programmiert:
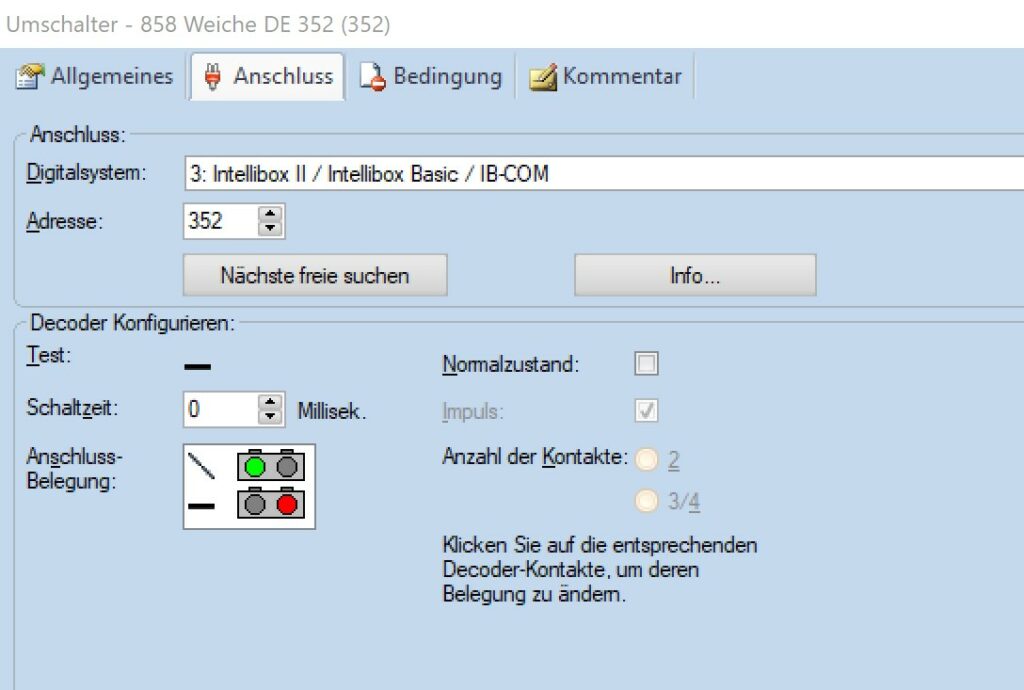
Als erstes wird eine Weiche in TC angelegt (Beispiel: DE 352) – allerdings ohne, das dafür eine Adresse eingetragen wird!
Als nächstes erstellen wir einen Umschalter, der nur dazu dient die Weiche von rechts nach links zu stellen. In meinem Beispiel hat die Weiche die Adresse 354 (im Bild sorry – 352) und hängt an einer Intellibox Basic. Diese Weiche wird über einen Servo und WA5 Weichendecoder umgestellt.
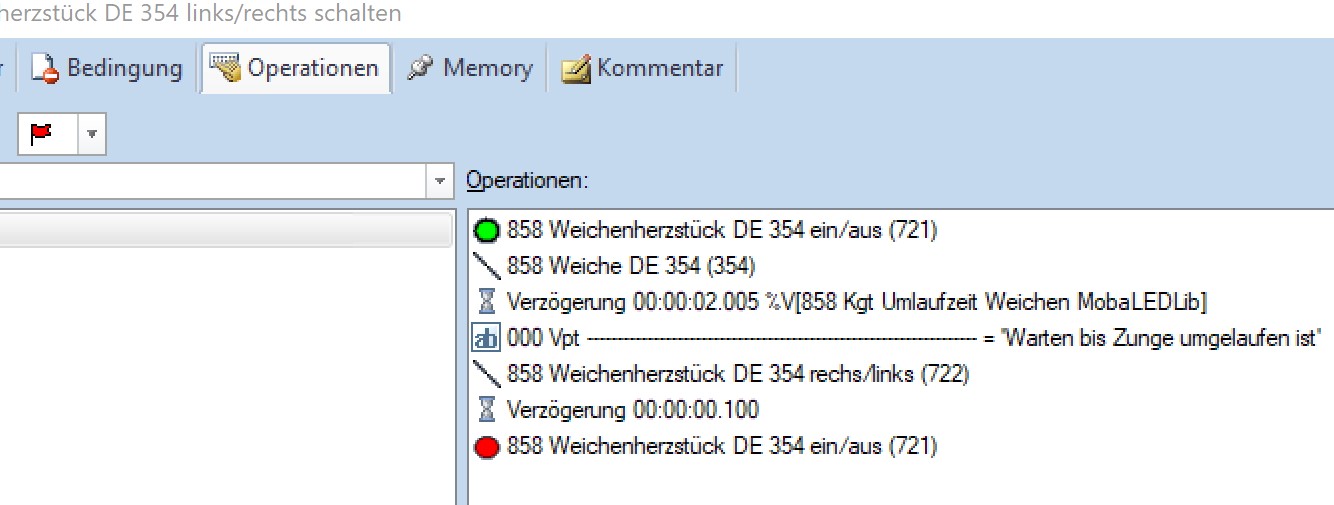
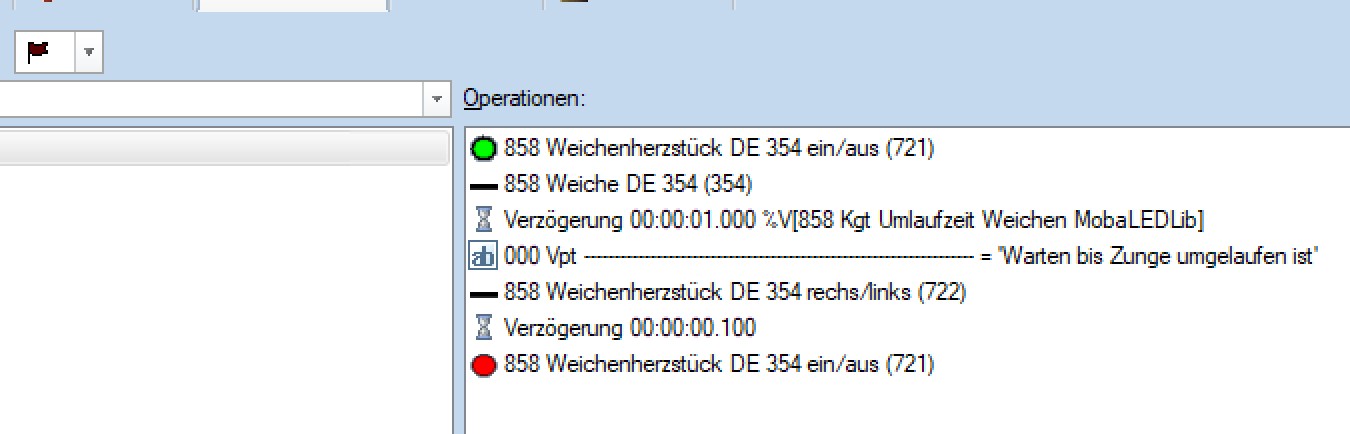
Dann erstellen wir einen Melder, der als Auslöser die Weichenstellung Abzweig hat. In den Operationen ist folgendes hinterlegt:
Zunächst wird das erste Relais eingeschaltet – es hat bei mir die DCC Adresse 721. Auch dieser Schalter ist ein Umschalter und mit der Adresse des Relaisbausteins aktiviert. Es wird also zunächst die Herzstückpolarisierung AUS geschaltet. Jetzt kann die Weiche aktiviert werden und die Zungen können umlaufen. Die Umlaufzeit habe ich in einer globalen Variablen vom Typ Zeit hinterlegt. Erst wenn die Weiche um gelaufen ist, darf ich jetzt auch die Polarisierung ändern. Dies erledigt ein Umschalter mit dem Namen „858 Weichenherzstück….“. Dieser Umschalter hat die Adresse 722 und ist damit das Relais B auf der Platine. Mit einer kleinen Verzögerung wird dann die Polarisierung auch aktiviert über Relais A
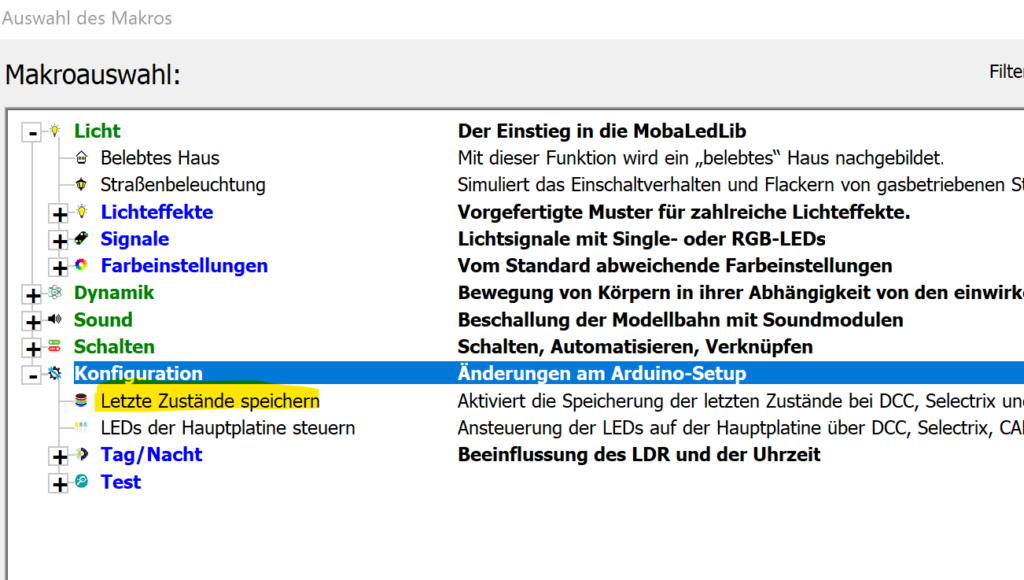
Das funktioniert im laufenden Betrieb einwandfrei. Beim Ausschalten der Stromversorgung der Relaisplatine würden aber auch alle Relais abfallen und beim erneuten Einschalten wäre ein Kurzschluss im wahrsten Sinne des Wortes vorprogrammiert! Aus diesem Grund ist es wichtig, das wir im Programmgenerator noch eine zusätzliche Funktion aktivieren:
Zustände speichern in der MobaLEDLIB
Hiermit ist sichergestellt, dass garantiert auch bei Ausschalten der Anlage der letzte Zustand aktiviert bleibt.
Ein Nachteil hat diese Vorgehensweise jedoch: Schalte ich die Anlage ein, ohne entsprechende Steuerungssoftware, und betätige dabei auch manuell – also nicht über die Steuerungssoftware – die Weichen deren Herzstücke über die Relaisplatine mit Spannung versorgt werden, so kommt es zum Kurzschluss. Um auch dieses – zugegeben geringe – Risiko zu vermeiden, deaktiviere ich beim Abschalten von Traincontroller die Polarisierung der Herzstücke, und aktiviere diese wieder beim Einschalten. Wer dies ebenfalls umsetzen will, dem empfehle ich einen Blick in die Programmdatei.
Eine weitere Absicherung ist eine Bedingung in der Betätigung des Weichenschalters: Um zu vermeiden, das die Weiche zu schnell hin und her bewegt wird und damit ebenfalls ein Kurzschluss auftreten würde, ist in der Bedingung für die Aktivierung der Weiche hinterlegt, das die Herzstückaktivierung aktiviert sein muss (also im Beispiel muss das Relais A deaktiviert sein).
Einbau
Zum finalen Einbau des Moduls gibt es nicht viel zu sagen – am wichtigsten: „Beschriftet alle Anschlüsse detailliert und macht euch am Besten auch eine Sicherungskopie eures Programmgenerators“. Letzteres funktioniert im Excel über „Optionen“ – „Dateien“ – „Speichern in Datei“.
Wie schon oben angedeutet, hatte ich mit dem Modul anfangs diverse Schwierigkeiten – daher hier mal eine Zusammenstellung der verschiedenen Fehler (und ich hatte alle davon)
Als erstes solltet ihr versuchen zu prüfen, ob die Relais überhaupt richtig angesteuert werden. Dazu empfehle ich eine „Testschaltung“. Wer häufiger mit der MLL arbeitet, der sollte sich auf jeden Fall eine Testschaltung mit 3-6 RGB LED gönnen, die in Reihe geschaltet sind. Tauscht diese Testschaltung gegen die Relaisplatine aus und schaltet dann die DCC Kommandos durch. Wenn alle RGB LED nach Aktivierung der DCC Adressen der Reihe nach leuchten, dann ist die Eintragung in der Excel schon einmal grundsätzlich richtig.
Sodann solltet ihr prüfen, ob die Helligkeit bei der Zeile „LED einstellbar“ auch wirklich auf 255 steht. Oftmals hört man ein leises, hochfrequentes Pfeifen wenn man die Relais mit zu niedriger Helligkeit konfiguriert hat. Diese benötigen zwingend die Einstellung 255!
Um sicherzustellen, das es nicht an der Hardware liegt, hat Michael aus dem Forum unter diesem Link beschrieben, wie man die Verbindungen testen kann – vor allem solltet ihr die SMD WS2811 mal genauer anschauen7an dieser Stelle nochmal tausend Dank an Dominik, der mir geholfen hat nicht nur meine Fehler zu finden, sondern auch meine SMD Lötfehler beseitigt hat.
Eine kalte Lötstelle an den Kondensatoren kann z.B. schon Schuld sein, das ein Relaispaar nicht schaltet.
Update – Erfahrungen
Inzwischen habe ich bereits den 2. Relaisbaustein über ein Jahr in Betrieb und bin damit sehr zufrieden.
Allerdings verwende ich ihn nicht mehr für die Herzstückpolarisierung. Der Grund dafür liegt vor allem darin, das ich häufig auch mit Traincontroller Tests und Konfigurationen ohne Verbindung zur Anlage mache. Dann steht die Weiche oftmals falsch und die Folge ist ein Kurzschluss. Auch kam es Hin- und Wieder vor, dass ein Relais zu spät geschaltet hatte, wenn eine ganze Weichenstraße geschaltet wurde.
Zum Einsatz kommt der Relaisbaustein daher immer dann, wenn 12V-Lampen mit DCC geschaltet werden, oder mechanische Entkuppler bewegt werden müssen.
Der Relaisbaustein arbeitet inzwischen seit einem Jahr ohne Probleme – er stellt eine ideale Ergänzung zu den Bausteinen der MobaLEDLib dar. Insbesondere wenn Verbraucher mit 12V geschaltet werden müssen. Zur Herzstückpolarisierung verwende ich die Relais wegen der Kurzschlussgefahr nicht mehr. In solchen Fällen ist eine direkte Kopplung mit den Weichenantrieben – insbesondere beim Einsatz von federnden Zungen – sinnvoller.
Artikel aktualisiert am 14.11.2022 Erfahrungen aus 5 Jahren Betrieb mit dem VT 11.5, neues Verfahren zur Vermeidung von Zugtrennung.
Grundsätzliches
Lange Zeit fristete dieser Bericht ein Schattendasein als PDF Dokument – dabei habe ich beim damaligen Umbau viel über den Einbau von LED und Sounddecoder gelernt. Auch lese ich oftmals Berichte, wo zwar der Umbau detailreich beschrieben wird – aber nicht, ob das Ergebnis auch noch nach vielen Jahren so funktioniert wie gedacht.
Daher hier endlich mal eine aktualisierte Version eines alten Dokumentes aus dem Downloadbereich – auch wenn ihr nicht gerade einen VT11.5 optimieren wollt – die hier gezeigten Verfahren kann man für viele Lokmodelle verwenden.
Roco liefert unter der Nummer 63098 und 64119 für das Erweiterungsset seit 2014 ein sehr schönes aktualisiertes Modell eines VT11.5 aus. Unter der Nummer 63099 gibt es auch eine digitalisierte Variante. Für das Modell ist von Roco eine (nicht digitalisierte) Beleuchtung erhältlich.
Der von mir vorgenommene Umbau der nicht-digitalisierten Variante bringt folgende Funktionen mit sich
Front- und Rücklampen werden fahrtrichtungsabhängig weiß/rot umgeschaltet
wie beim Vorbild strahlen nur die unteren Frontlampen – am jeweils rückwärtigen Wagen in rot
Reduzierung der genutzten Digitalspannung durch ausschließlichen Einbau von LED
ESU Sounddecoder mit erweiterten Geräuschfunktionen (aka „PIKO G Projekt“)
Sound im Motorwagen und im Steuerwagen durch Einbau von 2 Lautsprechern.
Führerstandsbeleuchtung sowohl im Steuerwagen als auch im Motorwagen
digital schaltbare Innenbeleuchtung in allen Wagen
verbesserte Stromabnahme über mehrere Wagen
Roco selbst bietet keine dieser Funktionen in der von Haus aus digitalisierten Variante mit Sounddecodern. Mir war aber vor allem die Frontbeleuchtung und die Innenbeleuchtung wichtig, da ein 7-teiliger Zug auch eine hohe Stromaufnahme und damit unnötigen Verbrauch teuren Digitalstroms zur Folge hat. Durch die schaltbare Innenbeleuchtung kann der Zug im Untergrund unbeleuchtet abgestellt werden.
Materialien
Die hier vorgestellte Digitalisierung ist wesentlich günstiger als die Variante von Roco – dort kostet allein der digitale Triebkopf 354€ (die nicht digitale Variante konnte ich in der Bucht neuwertig zu 160€ ersteigern). Hier mal eine Übersicht der erforderlichen Materialien:
Abbildung 1 – LED Meterware
1 rote und 4 weiße SMD LED für Führerstands- und Frontbeleuchtung
Vorwiderstände für LED
3 Mikroschalter Ein/Aus
ein Set kleine Steckverbinder
ESU Sounddecoder 4.0 + 2 x 23er Lautsprecher von ESU a 4 Ohm
Uhlenbrock Funktionsdecoder für Steuerwagen
LED Meterware mit warm/weissen LED (siehe Abbildung)
Vorwiderstände für LED Meterware
Decoderlitze – am besten gleich in 6 verschiedenen Farben
elektrische Buchsen für den VT von www.digital-bahn.de (Sven Brandt)
SMD LED gibt es inzwischen unzählig viele bei den einschlägigen Elektronikherstellern wie Reichelt oder Conrad. Wichtig ist, dass die LED mit einem entsprechenden Vorwiderstand betrieben werden müssen. Dieser Vorwiderstand ist allerdings vom LED Typ abhängig. Dieser LED Rechner ist dabei sehr wertvoll da er entsprechend der Schaltung und dem LED Typ den Widerstand berechnet.
Die LED Meterware (siehe Abbildung 1) bekommt man am günstigsten über e-bay – so habe ich für 60m warm/weiße LED nur 9€ inkl. bezahlt. Diese LED’s lassen sich in 3er Stücken teilen – meine Empfehlung gleich hier: Besser sind LEDs die sich in 4-er Blöcke teilen lassen, um eine gleichmäßigere Ausleuchtung des VT zu erhalten.
Der Funktionsdecoder ist erforderlich, weil der Sounddecoder pro Ausgang nur maximal 250mA an Stromaufnahme erlaubt – wir aber über alle Wagen eine wesentlich höhere Aufnahme haben. Des weiteren könnten wir die dazu notwendige Anzahl an Leitungen nicht über alle Wagen verteilen! (So wären dann z.B. 5 Leitungen für LED, 2 Leitungen für Stromabnahme, 2 Leitungen für Lautsprecher, 2 Leitungen für Stirnbeleuchtungen erforderlich.) Zudem ist ein Funktionsdecoder mit 10-15€ relativ günstig zu erstehen.
Elektrische Kupplungen: Wichtigstes Element sind die elektrisch leitenden Kupplungen von Herrn Brandt . Ohne diese wäre weder ein 2. Lautsprecher möglich noch die verbesserte Stromabnahme über mehrere Wagen hinweg oder die Digitalisierung der Innenbeleuchtung.
Ein Set der Kupplungen von Digital-Bahn (Artnr. „kupp_vt601_erg“) reicht für einen vollständigen 7-teiligen Zug. Es gibt jedoch 2 verschiedene Sets von Kupplungen da Roco teilweise unterschiedliche Kupplungen verwendet: Der Motorwagen hat IMMER eine kurze Kupplung während der Steuerwagen (also der Zugkopf der nicht mit einem Motor ausgestattet ist!) manchmal mit kurzer und manchmal mit langer Kupplung ab Werk ausgestattet ist. Deshalb vorher auf den eigenen Steuerwagen schauen und entsprechend die Kupplungen mit langer oder kurzer Buchse bei Herrn Brandt bestellen.
An Werkzeug reicht was die MOBA Werkstatt hergibt ohne irgendwelche Besonderheiten – Lötkolben und ein Set mit kleineren Schraubendrehern. Pinzetten sind noch wertvoll, außerdem doppelseitiges Klebeband sowie Klebstoff, um die Kabel später zu fixieren. Ach ja: Wer keine Adleraugen hat oder direkt die SMD-LED mit angelötetem Kabel kauft, für den ist eine 3. Hand mit Lupe zu empfehlen.
Umbau Steuerwagen
Zunächst sollten wir uns um den Steuerwagen kümmern1also der Triebkopf ohne Motor. Das Öffnen erfolgt relativ einfach, indem die obere Abdeckung zusammengedrückt wird und dann mitsamt dem Fenstereinsatz für den Führerstand abgenommen werden kann. Wie in der Betriebsanleitung beschrieben, wird danach die Schraube unter dem vorderen Drehgestell gelöst und danach die Schraube von der hinteren oberen Halterung. Bei dieser Schraube ist Aufpassen angesagt! Bei mir hat sich nach mehrmaligen Festdrehen die Schraube durch den Kunststoff gedreht. Man darf die Schraube auf keinen Fall zu fest drehen!
Als nächstes löst man direkt die Schaltplatine und entfernt Lampen und Dioden – beide werden für den weiteren Umbau nicht mehr benötigt.
Decoder Steuerwagen
Liegt der Steuerwagen so geöffnet vor uns sollte zunächst der Funktionsdecoder an seinen Platz (der hier zum Glück reichlich vorhanden ist) unter der Schaltplatine. Selbstverständlich kann man auch einen anderen Funktionsdecoder als den Uhlenbrock verwenden (so hat auch digital-bahn.de einen sehr günstigen und genau den Anforderungen entsprechenden Funktionsdecoder im Programm). Jedoch sollte dieser an mindestens einem seiner Ausgänge eine Stromaufnahme von mindestens 1 A vertragen. Man sollte bei jeder LED mit ca. 25mA rechnen. Wer 8 LED in jedem Wagen verbaut, hat somit bei 5 Wagen eine Leistungsaufnahme von 1 A. Außerdem sollte der Decoder 4 Ausgänge aufweisen:
A1 Führerstandbeleuchtung
A2 Innenbeleuchtung Wagen
A3 Frontlicht
A4 Rücklicht
Die Aufteilung ist wichtig, weil beim Uhlenbrock nur A1 mit A2 und A3 mit A4 gemeinsam gedimmt werden können.
Abbildung 2 – VT11.5 Steuerwagen – Leiterplatine
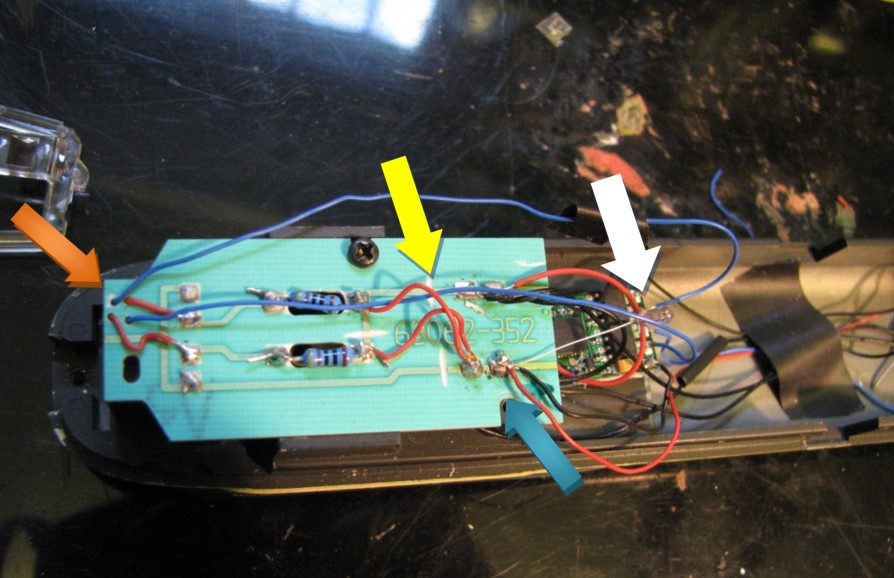
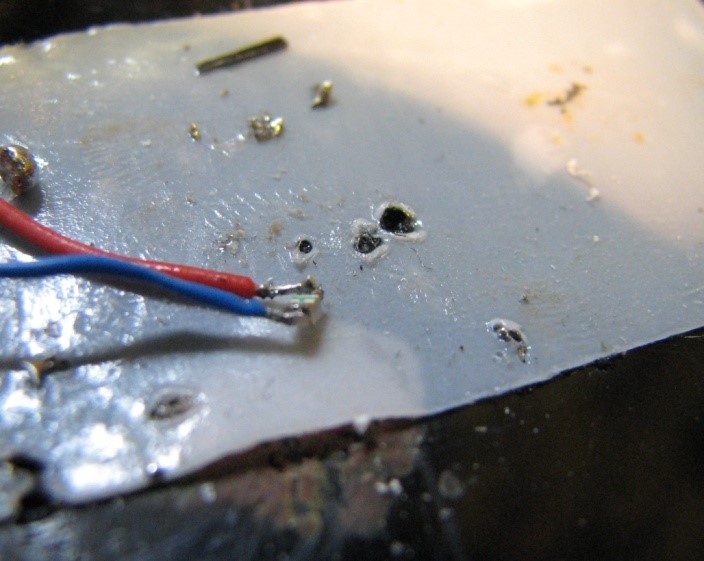
An 3 Stellen müssen wir die Leiterbahnen auftrennen (siehe gelber Pfeil) Danach werden 4 Löcher mit einem 1mm Bohrer genau über der Lichtaustrittsöffnung gebohrt (oranger Pfeil). An diese Stelle kommen nachher die beiden LED übereinander – jeweils die weiße und die rote LED.
Nun werden die Dioden entfernt und an deren Stelle die Vorwiderstände für die jeweils rote und weiße LED eingelötet.
Bevor die Leiterplatte verkabelt wird, müssen die SMD LEDs noch mit Anschlusskabeln versehen werden. Optimal wäre wenn man für alle 6 Kabel auch 6 unterschiedliche Farben hätte – leider war mein Mobahändler allerdings nur mit 4 Farben bestückt, sodass ich folgende Einteilung bei mir vorgesehen habe:
rot – LEDs Pluspol
Blau – LEDs Minuspol
Grau – gibt es 2x für die Lautsprecher
Schwarz – gibt es ebenfalls 2x für die Stromzuführung vom Gleis
Abbildung 3 – SMD LED Löten
Für das Löten der SMD LED sollte man schon sehr genau hinschauen. Im Netz gibt es diverse Anleitungen, wie man SMD LEDs am besten lötet – deshalb erspare ich mir hier die Beschreibung. Ich kann allerdings die Nutzung von doppelseitigem Klebeband gemäß Abbildung sehr empfehlen
Dabei darauf achten, dass man den Pluspol auch wirklich am Pluspol anlötet! Die roten Anschlusskabel für die rote und weiße LED müssen gerade so lang sein, dass sie bis zum Anschluss auf der Platine reichen (oranger Pfeil), während der blaue Anschluss jeweils an A3 und A4 des Decoders angeschaltet werden. Der blaue Anschluss für die weiße LED wird außerdem nachher noch an die 3. LED geführt welche das 3. Spitzenlicht wiedergibt.
Ich habe mir angewöhnt alle LED vor dem Einbau erst zu testen – was mit einem entsprechenden Trafo und einer fliegenden Verkabelung recht schnell vonstatten geht. Dabei sollte man unbedingt eine regelbare Gleichstromquelle verwenden – und natürlich darauf achten die LED mit der richtigen Polung anzuschließen!
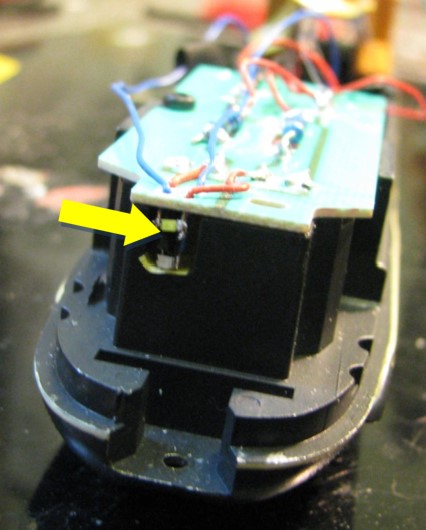
Abbildung 4: Die beiden LEDs für die unteren Lampen werden dann übereinander geführt, sodass sich von vorne nebenstehendes Bild ergibt. Deutlich sind hier die beiden unterschiedlichen LEDs zu erkennen. Am Boden der Durchlassöffnung wurde der Rahmen mit ein wenig Isolierband gegen Kurzschlüsse gesichert. Wichtig ist, dass beide LEDs nahezu übereinander liegen (wer Spaß hat kann auch zweifarbige LED verwenden – dafür braucht man dann aber wirklich Adleraugen, um die 4 Anschlüsse an eine SMD LED zu bekommen).
Verkabelung Steuerwagen
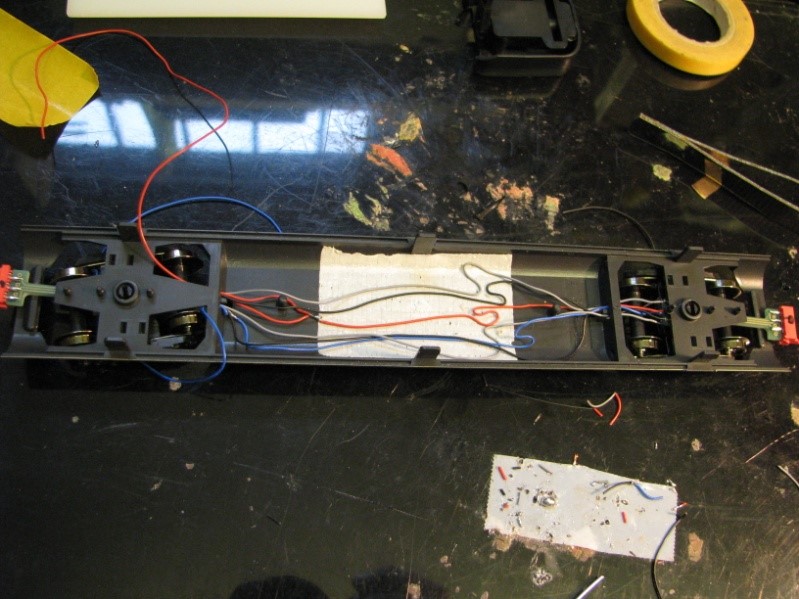
VT11.5 Motorwagen – 3. Spitzenlicht
Im Wagenboden liegen bereits die schwarzen Kabel der Stromzuführung, die von den 4 Achsen abgenommen werden. Ein Kabel wird direkt mit dem Decoder verbunden, wobei man an der Verbindungsstelle noch ein weiteres Kabel anlötet welches später an die stromführende Kupplung angelötet wird. Der Pluspol des Decoders wird auf die Platine geführt (türkisfarbener Pfeil) und die Platine wie im Bild verkabelt.
Bereits jetzt kann man ausprobieren, ob der Decoder mit den LED auch wirklich funktioniert. Dabei muss allerdings beachtet werden, dass der Decoder nur programmierbar ist, wenn an A1 auch ein ausreichend groß dimensionierter Verbraucher angeschlossen ist. Der Anschluß der LED an A1 reicht nicht aus! Ich habe daher eine 12 V Glühbirne an A1 angeschaltet (weißer Pfeil). Außerdem empfiehlt es sich am Decoder anfangs jedem Ausgang genau eine Funktionstaste zuzuordnen, also F1 zu A1, F2 zu A2 usw.
Motorwagen – oberes Spitzenlicht
Wenn die weiße LED eingeschaltet ist, wird das Licht der roten LED überdeckt – daher nicht etwa denken, dass die rote LED nicht funktioniert! Funktioniert auch dieser Decodertest, kann die 3. LED für das Spitzenlicht montiert werden gemäß Abbildung.
Diese LED wird mittels doppelseitigem Klebeband fixiert – dabei sollte auch hier der zugehörige Widerstand nicht vergessen werden. Damit die LED möglichst aufrecht steht und in Richtung des Spitzenlichts zeigt,wird dieses mit einem Kunststoffring (oder was sich sonst in der Bastelkiste findet) aufgerichtet
Motorwagen – Funktionsdecoder programmieren
Nun sollte wieder ein Funktionstest erfolgen:
bei F1 brennt nur die spätere Führerstandbeleuchtung
bei F2 brennt nichts – F2 ist für die Innenbeleuchtung vorgesehen
F3 (weiss) sollte bei Vorwärtsfahrt angehen
F4 (rot) bei Rückwärtsfahrt
Wenn dies einwandfrei funktioniert, wird A1 auf F11 und A2, A3 und A4 auf F0 gelegt. Man kann auch eine andere Kodierung verwenden, allerdings soll der gesamte Zug ja nachher unter einer Adresse ansprechbar sein (bei mir die Adresse 11). Daher muß der Decoder auf Adresse 11 antworten. Wird dann hinterher auch der ESU Decoder auf die 11 programmiert, so werden beide Decoder mit F0 die entsprechende Funktion einschalten.
Die Tatsache, dass beide Decoder auf die Adresse 11 reagieren, macht allerdings die Programmierung schwierig, wenn der gesamte Zug später auf dem Programmiergleis steht. Genau deshalb verwenden wir die Mikroschalter ,die zwischen Stromversorgung und Decoder geschaltet werden. Sie dienen später dazu genau den zu programmierenden Decoder auszuwählen. Es nutzt übrigens nichts, nur den Steuerwagen (wenn man diesen Programmieren will) ins Programmiergleis zu stellen weil wir ja später eine durchgehende Stromversorgung haben. Alternativ kann man höchstens den Zug zur Programmierung immer trennen und dann den getrennten Zugteil programmieren.
Motorwagen Stromführende Kupplung
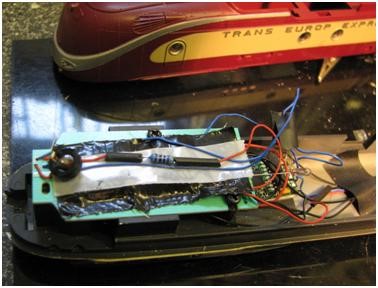
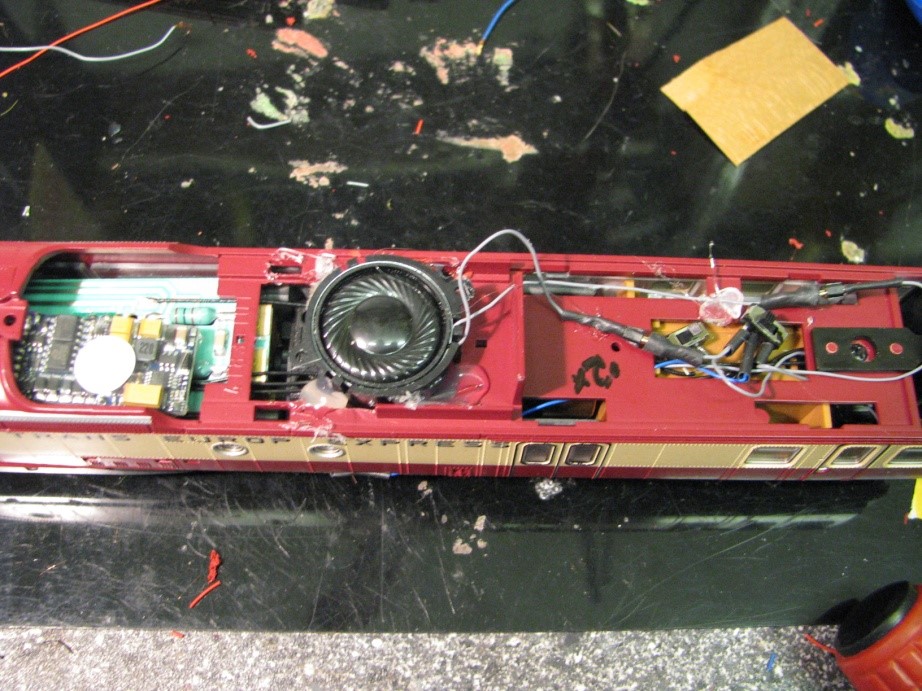
Hier mal eine Übersicht, wie unser Motorwagen jetzt ausschauen sollte – wobei hier jetzt auch schon die Lautsprecherkapsel mit eingebaut ist (da der Lautsprecher nicht mit dem Funktionsdecoder verbunden wird, sondern nur über die Kupplung eine Verbindung zum Sounddecoder im Motorwagen hat)
VT11.5 Motorwagen Gesamtbild
Nun sollten wir die stromführenden Kupplungen belegen. Diese bestehen jeweils aus einer Buchse und einem Stecker. Wie man die Kupplungen richtig zusammen lötet ist hinreichend hier beschrieben – deshalb erspare ich mir diesen Teil. Auch beschreibt Herr Brandt sehr detailliert in seiner Dokumentation, was beim Zusammenbau zu beachten ist.
Was man allerdings auch beachten sollte: War es vorher möglich die Wagen, sowohl links- als auch rechtsherum anzukuppeln, ist dies mit den elektrischen Kupplungen nur noch in eine Richtung möglich, da jeder Wagen jeweils einen Stecker und eine Buchse besitzt und somit die Einbaurichtung im Zug vorgegeben ist. Ist der siebenteilige Zug erst einmal zusammen gebaut und steht am Stück auf dem Gleis, wird man ihn kaum zum Wenden wieder herunternehmen – es sei denn man hat eine Kehrschleife, in der ein Wenden möglich ist. Beschriften Sie daher ihre Wagen am Wagenboden nach ihrer Reihenfolge im Zug.
Seite
Position
Buchse
Stecker
Unterseite
Hinten
Schwarz 1
Rot
Mitte
Blau
Grau 2
Vorne
Grau 1
Schwarz 2
Oberseite
Hinten
Rot
Schwarz 1
Mitte
Grau 2
Blau
Vorne
Schwarz 2
Grau 2
Belegung elektrische Kupplungen
Stecker und Buchse wechseln die Belegung von unten nach oben! Um Fehler zu vermeiden erstellt man einen Belegungsplan von Stecker und Buchse. Das sieht bei mir so aus:
Für die Tabelle gilt, dass der Stecker beim Löten immer nach links liegen muss 2als Eselsbrücke: Draufsicht von oben und Steuerwagen Front zeigt nach links, die Buchse nach rechts. Hier wird auch deutlich, warum es effektiver ist, 6 Farben zu verwenden anstatt nur 4!
Ich habe mich auf folgende Farbzuordnung festgelegt (ja – es gibt eine NEM Farbzuordnung, die ich aber ob der eingeschränkten Mittel leider nicht nutzen konnte).
Grau = Lautsprecher. +/- spielt hier zunächst noch keine Rolle – muss man später eh ausprobieren (s.u.).
Schwarz 1 = linke Schiene bei Steuerwagen nach links
Blau = LED –
Rot = LED +
Da man Stecker und Buchse auch schnell versehentlich falsch herum montiert, wird jeder Stecker und jede Buchse auf der geplanten Oberseite mit einem schwarzen Filzstift markiert.
Auch hat es sich bewährt die Buchsen der Kupplungen schon vor dem Einbau in Serie zusammen zu löten, um Fehler zu vermeiden – man muss dann danach nur noch die Kabel durch den Boden führen und die Stecker anlöten. Die Führung der Kabel kann problemlos im unteren Bodenbereich erfolgen, die Kabel sollten allerdings nicht straff im Wagenboden verlegt werden, um den Kupplungen genug Spiel in Kurven zu lassen. Außerdem die Kabel möglichst nicht übereinander legen, da es nur wenig Spielraum zwischen Beschwerungsblock und oberem Einbaurahmen gibt.
Achtung: Das Drehgestell des Motorwagens hat – wie auch der Zwischenwagen – einen Steg welcher vor dem Zusammenbau ebenfalls getrennt werden sollte. Bei mir hat dieser Steg zu Entgleisungen in einer Kurvenüberhöhung 500mm geführt (siehe auch Beschreibung beim Zwischenwagen und Abbildung 10).
Zwischenwagen
Die normalen Zwischenwagen sind vom Grundsatz her identisch aufgebaut. Allerdings: Da die Wagenrichtung jetzt vorgegeben ist sollte man schon beim Einbau der Kupplungen die spätere Zugzusammenstellung beachten . Bevor man das Gehäuse abnimmt macht man sich am besten mit Tesafilm Markierungen an die jeweiligen Seiten machen.
Der Grund:
Der Rahmen muß später in Flucht mit den eingeklappten Trittstufen montiert werden. Wer genau hinschaut erkennt im Rahmen diese Trittstufen.
Die Züge wurden immer so zusammengestellt , dass sich die Einstiegstüren zwischen zwei Wagen sich nie gegenüber lagen, um lange Wege beim Einsteigen zu vermeiden. Das sollte man auch im Modell beachten.3wer sich am Schluß mein Modell anschaut wird feststellen, daß ich diese Regel selbst an einer Stelle nicht eingehalten habe und genau diesen Fehler gemacht habe. Zur Korrektur müsste der gesamte Kupplungsteil abgelötet, gedreht und wieder neu angelötet werden.
Die Arbeiten an den Wagen beschränken sich darauf, einerseits die LED für die Beleuchtung einzubauen und andererseits die Anschlüsse an die Schienenversorgung durchzuführen. Die Kabel für den Lautsprecher werden ausschließlich nur durch den Wagen hindurch geführt.
Der Wagen ist relativ einfach zu öffnen. Ein kleiner Schraubenzieher wird in die Nut zwischen Wagenkasten und Aufbau eingeführt, um dann durch leichte Drehung des Schraubenziehers die Rastnasen vom Unterbau zu trennen:
In gleichem Maße wird mit dem Dach verfahren. Am Schluss sollten wir folgende Teile vorfinden
VT11.5 Wagen – Übersicht
Hier ist jetzt die erste wichtige Fräsarbeit durchzuführen.
An jedem Drehgestell findet sich eine Verlängerung des Drehgestells in Form eines Stegs, welcher etwas überhöht ist. Ich vermute, dass es sich dabei um die Aufnahme für die Stromabnahme bei Kauf einer Original-Roco Innenbeleuchtung handelt – es kann aber auch sein, dass es für einen Schleifer bei Wechselstromfahrern ist.
Dummerweise sitzt diese Verlängerung extrem eng unter der Kupplung und wenn die Kabel angelötet sind, brechen diese meist schnell ab .
Da wir dieses Teil nicht benötigen (der Betrieb wird damit auch nicht verbessert…), wird es einfach ab gefräst. Das geht am besten mit einem kleinen Dremel oder einer Laubsäge – sonst muss man halt die Feile nehmen. Das Ergebnis seht ihr hier links im Bild
Der 7-teilige Zug hätte insgesamt 28 Stromabnahmepunkte wenn man jedes Drehgestell anschließen würde. Das ist aber für unseren Verwendungszweck nicht erforderlich. Genau genommen würde es reichen, wenn nur der Motorwagen und der Steuerwagen mit Stromabnahmepunkten versorgt wären. Allerdings kann dies zu Problemen mit elektronischen Steuerungen wie z.B. Traincontroller führen, da der Abstand zwischen den beiden Wagen sehr lang wäre und der gesamte Bereich zwischen Motorwagen und Steuerwagen nicht überwacht ist. Daher habe ich jeweils das linke und das rechte Drehgestell pro Wagen einseitig an die durchgehende schwarze Stromleitung angeschaltet.
Update 2022: Im laufenden Betrieb kam es nach mehreren Monaten problemlosen Betriebs, gleich zweimal zum Ausfall des eingebauten ESU Sounddecoders. Netterweise hat ESU diesen Decoder kostenlos ersetzt. Inzwischen habe ich mich von der durchgehenden Stromabnahme verabschiedet:Nur noch der Motorwagen und der direkt dahinter liegende Zwischenwagen ist gemeinsam mit dem Sounddecoder verbunden. Seitdem (inzwischen sind ca. 4 Jahre vergangen), gab es auch keinen Ausfall mehr des Decoders. Ich habe leider keine Ahnung, warum der Decoder damit Probleme hatte, aber die Lösung scheint funktioniert zu haben.
Zwischenwagen – Innenbeleuchtung
Rotes und blaues Kabel werden über die Übergänge in den Innenraum geführt. Dies wäre auch über den Innenraum selbst möglich, aber durch die Führung über die Übergänge vermeidet man störende Kabel beim Blick in den Innenraum
VT11.5 Wagen – Led Beleuchtung
Auch wenn es in diesem Falle nicht unbedingt erforderlich ist, werden die Kabel mit kleinen Steckverbindern versehen, um die Abnahme des Daches im Wartungsfall zu vereinfachen.
Die Kabel der Stromzuführung und des Lautsprechers werden unter dem Kunststoffgewicht verlegt. Um den Kabelsalat zu vereinfachen, aber auch, um zu vermeiden das die Kabel übereinander liegen (wodurch sich das Gehäuse nicht mehr aufsetzen lassen würde) wird doppelseitiges Klebeband zur Fixierung verwendet.
Motorwagen
Bevor wir mit dem Umbau des Motorwagens beginnen, empfiehlt es sich jetzt entsprechende Testfahrten durchzuführen. Dazu benötigt der Motorwagen lediglich seine kurze Kupplung. Wie von Herrn Brandt beschrieben ist es bei meiner Serie zwingend erforderlich gewesen die Kupplung am Motorwagen nicht nur rund, sondern diese auch möglichst dünn zu feilen. Wichtig ist, dass sich die Kupplung auch nach der Befestigung der Schraube noch im Schacht bewegen lässt. 4wenn der Motorwagen sich später, vornehmlich in engen Kurven, von dem Rest des Zuges abkuppelt, so liegt dies oft daran, dass die Kupplung nicht genug Bewegungsfreiheit hat. Dünneres Feilen um nur wenige 1/10 mm hat hier Abhilfe geschaffen. Besser anfangs zu wenig abfeilen anstatt zu viel!
Bei den Testfahrten kam es bei mir in einer Kurve von 500mm (alle meine Radien sind maximal 50cm), die mit einer Überhöhung versehen war zu Entgleisungen des Motorwagens. Genaue Analysen zeigten, dass die Schürze in diesem Bereich sehr eng anliegt. Bei mir hat es geholfen die Schwenkfreiheit der Kupplung durch Kabelverlegung zu verbessern. Wer engere Kurven hat, der muss u.U. die Schürze etwas weiter fräsen.
Als nächstes kommt der Einbau des Decoders was aufgrund der 8-poligen Schnittstelle wenig Probleme bereiten sollte. Die vorhandene Platine benötigt ebenfalls keine Änderung. Nur unser Schalter wird wieder eingebaut – dabei muss einer der Schienenkontakte des vorderen Drehgestells abgelötet werden und mit an den Schalter gelegt werden:
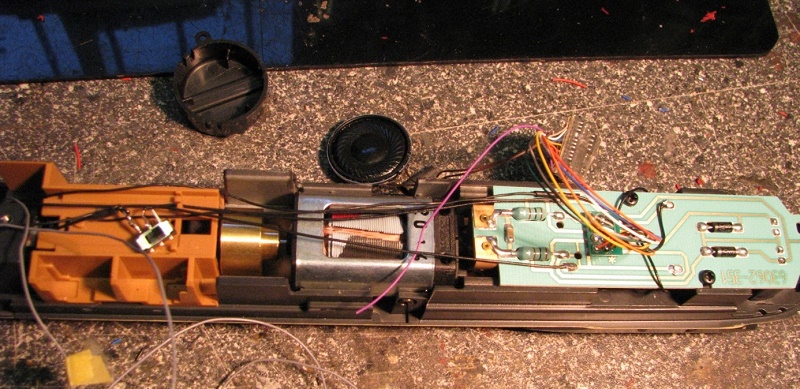
VT 11.5 – Decoderplatine des Motorwagens
Der Decoder selbst kann ziemlich weit nach vorne über die beiden Dioden kommen und hat dort noch genügend Platz. Die Dioden und Widerstände können an ihrem Platz verbleiben, da die Platine bereits für eine Schnittstelle vorbereitet ist.
Schwieriger ist es den Platz für den Lautsprecher zu finden. Hier kommt wieder die Fräse zum Einsatz – wobei nur ein kleiner Teil über dem Motor ausgefräst werden muss:
Zum Einsatz habe ich 2 ESU Lautsprecher 23er mit 4 Ohm verwendet die – anders als bei ESU angegeben – in Reihe geschaltet werden! Dadurch ergeben sich wiederum 8 Ohm – was allerdings ein etwas geringeren Lautstärkepegel bedeutet (was aber dem Sound nachher keinen Abbruch tut!).
Der 2. Lautsprecher wurde bereits anfangs in den Steuerwagen eingebaut. Fixiert wird der Lautsprecher mit Kunstoffkleber aus einer Klebepistole
VT11.5 Motorwagen – Einbau Lautsprecher
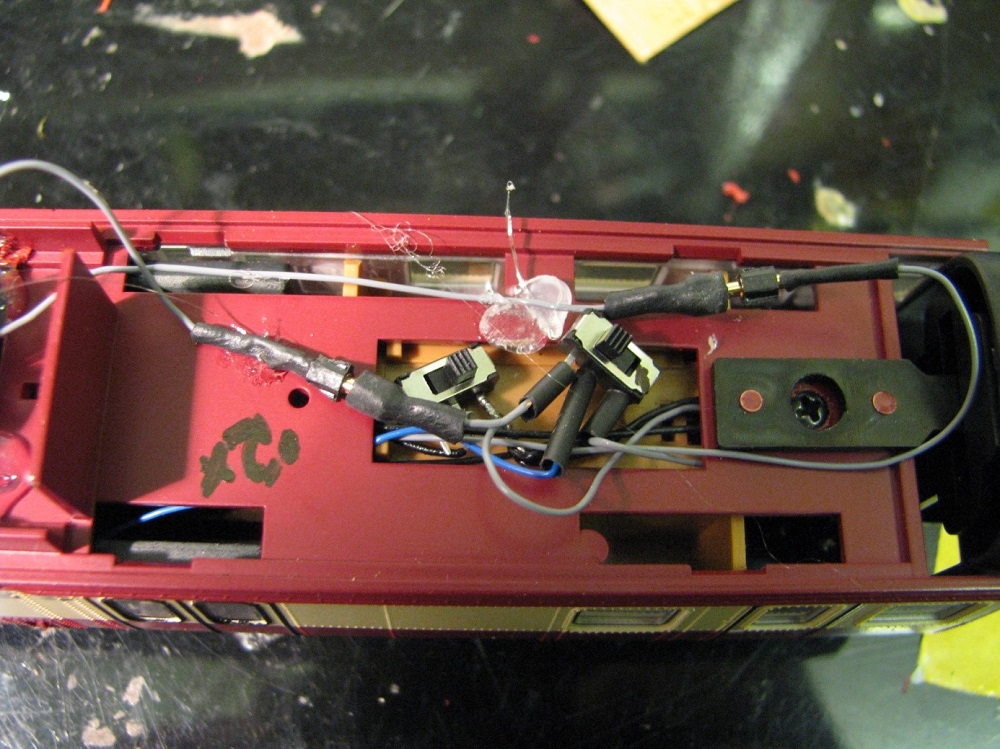
Problematisch ist jetzt nur, dass für alle CV Einstellungen die den Sound betreffen der 2. Lautsprecher ebenfalls mit angeschlossen sein muss. Um dies zu umgehen und die Lok auch ohne angeschlossenen Steuerwagen testen zu können, kam nochmals ein Mikroschalter zum Einsatz. Dieser verbindet entweder beide Lautsprecher oder nur einen Lautsprecher.
Eine Markierung auf dem Schalter zeigt mir an welche Einstellung beiden Lautsprechern entspricht. Relevant ist dies nur für die Programmierung – im späteren Betrieb steht der Schalter immer so das beide Lautsprecher aktiv sind. Wer – wie hier beschrieben – einen ESU Decoder verwendet kann sich die Schalter übrigens sparen. Durch den s.g. Decoderlock ist es möglich, dass bei der Programmierung der Decoder selektiv ausgewählt werden kann5dann sollte man nur vor der Programmierung immer daran denken, am richtigen Decoder den Lock zu entfernen bzw. zu setzen.
Motorwagen – Decoderprogrammierung
Die Details wie ein ESU Sounddecoder programmiert wird ist der jeweiligen Betriebsanleitung zu entnehmen. Bei mir kam ein Loksound V4 (November 2013) zum Einsatz. Wer einen ESU Lokprogrammer zum Laden der Geräuschprojekte hat sollte sich das ESU Projekt für den PIKO VT11.5 laden, da in diesem Projekt der 2. Motor getrennt angesteuert werden kann. Leider hat der Decoder nur einen Lautsprecheranschluss – daher hört man natürlich den 2. Motor auch über beide Lautsprecher. Glücklicherweise hatte der Fachhändler meines Vertrauens die Möglichkeit den Decoder mit dem entsprechenden Projekt zu laden. An dieser Stelle auch mal ein herzliches Dankeschön – auch an die Kollegen bei Rössler die dort die Zeit nahmen mit mir dieses Projekt zu diskutieren!
Hier nur einige Besonderheiten die speziell für diesen Zug zum Einsatz kamen:
Lautstärke: Sehr von Vorteil ist die Funktion der Lautstärkeregelung über Funktionstasten. Dazu sollte man sich mit den s.g. Mappingzeilen vertraut machen.
Umstellung AUX2 auf LED Typ (Neonlampe) mittels CV32 auf 0 und CV283=16, CV286=5, CV287=128
Gleichzeitig wurde über die Mappingzeile die Bedingung eingestellt, daß der Motorwagen nur dann den Führerstand erleuchtet wenn der Zug steht. Für den Steuerwagen kann dies aufgrund der fehlenden Funktionalität nicht eingestellt werden (hätte dort aber auch keinen Sinn, weil der Decoder ein reiner Funktionsdecoder ist und nicht erkennen kann ob der Zug steht oder nicht). Um mit der Mappingzeile den durch das Projekt voreingestellten Mappings nicht in die Quere zu kommen empfiehlt es sich von unten nach oben eigene Mappings zu erstellen – also ab Zeile 40. Mein o.g. Mapping habe ich in Zeile 33 durchgeführt: CV32 muß auf 4 sein, CV257 danach auf 18 (CV A) und CV266 (CV K) auf 8 (AUX2 an), CV260 (CV D) auf 4 (F11 = Führerstandbeleuchtung).
Anpassung der Langsamfahreigenschaften. Dies ist notwendig weil der Zug in geschobenem Zustand sich bei mir nur ruckartig in den unteren Spannungsbereichen bewegte. Hier sollte man die ESU Parameter CV52 und CV51 erhöhen. Bei mir waren die Werte 50 und 10 zielführend.
Das Gesamtprojekt hat folgende Funktionstasten zugeordnet – wobei Licht und F11 neu hinzu gekommen sind6F11 ist im Geräuschprojekt mit dem Kupplungsvorgang belegt – dieser musste dafür weichen – schliesslich wird unser Zug so schnell nicht wieder entkuppelt...
Taste
Funktion
F0
Licht vorn und Innenraum
F1
Motor #1
F2
Signalhorn
F3
Motor #2
F4
Hilfsdiesel
F5
Kompressor
F6
Beschleunigungs-/Bremszeit, Rangiergang
F7
Kurvenquietschen
F8
Führerstandslicht ein/aus (AUX)
F9
Pressluft ablassen
F10
Schaffnerpfiff
F11
Innenbeleuchtung
F12
Sanden
F13
Bremse lösen/anlegen
F14
Bahnhofsdurchsage #1
F15
Kurzpfiff
F16
Türe Öffnen/Schließen
F17
Schienenstöße
F18
Bahnhofsdurchsage #2
F19
Kuppeln
F20
Bahnhofsdurchsage #3
F21
Lüfter
Funktionsbelegung VT 11.5
Die Funktionstastenzuordnung wurde wie zu einem Großteil aus dem Geräuschprojekt von ESU übernommen. Lediglich das Licht wird bei mir generell gemeinsam für Innenraum und Frontbeleuchtung /Rücklicht geschaltet.
Wer mit einer digitalen Steuerung arbeitet kann dort ebenfalls noch Bedingungen definieren.
Traincontroller
Wer keinen Traincontroller (TC) im Einsatz hat kann die folgenden Zeilen überlesen. Auch wird vorausgesetzt, dass jeder der mit TC seine Anlage steuert sich mit diesem Programm entsprechend auskennt. Daher auch hier nur die Besonderheiten:
Das Einmessen der Lok erfolgte nur mit dem Motorwagen. D.h. der Rest des Zuges wurde getrennt. Generell ist dabei so zu verfahren wie auch in dem entsprechenden TC Wiki beschrieben. Zum Einmessen wurden CV3 und CV4 auf 0 gesetzt.
Die Loklänge gemäß der Zuglänge definieren – also ziemlich genau 152cm. Die Wagen wurden dann alle mit Länge 0 definiert.
Der VT11.5. hat leider das Problem, daß das 1. Drehgestell des Motorwagens mit Haftreifen versehen ist. Das führt dazu, daß die vordersten Räder des Motorwagens nur sporadisch Kontakt haben. Ich habe daher den Kontaktpunkt für Vorwärtsfahrt auf das 2. Rad des Drehgestells gesetzt.
Und hier dann endlich der Lohn der ganzen Arbeit anhand eines Videos
Nutzung auf eigene Gefahr und ich übernehme keinerlei Anspruch auf Vollständigkeit etc. (C) Mai 2015
Nachtrag April 2022
Nach einem Jahr intensivem Betriebs des Zuges, gab es dann aber doch noch Probleme. Der Zug hat immer wieder an unterschiedlichen Positionen – meist aber immer irgendwo an den Zwischenwagen, entkuppelt. Das hat man bei geschobenem Zug natürlich erst gemerkt, wenn die Beleuchtung nicht mehr funktionierte, oder die Betriebsgeräusche nicht mehr funktionierten.
Nach einer genaueren Analyse zeigte sich, dass die elektrischen Kupplungen von Herrn Brandt mit der Zeit ausleiern. Dies tritt vor allem dann auf, wenn der Zug häufig gezogen wird – hier sind dann die Zugkräfte doch höher als dies dauerhaft für eine sichere Verbindung ausreicht.
Mittels eines 3D Druckers wurde ein Klipp erstellt, mit dem die Kupplungen sicher zusammengehalten werden. Es reicht, wenn nur ein Teil der Problem-Wagen damit ausgestattet wird. Damit habe ich seit nun 2 Jahren jetzt keine Entkupplungsprobleme mehr!
Eine Kopie der Druckdatei findet ihr im Downloadbereich zur freien Verfügung
Nachdem ich mit DCC LED Steuerungen mit der von Modelleisenbahnern entwickelten MobaLEDLib so viele positive Erfahrungen gemacht hatte, habe ich mich diesmal an die nächste Stufe gewagt – DCC Servobausteine. Um es vorwegzunehmen:
Mittels der Elektronikbausteine der MobaLEDLIB ist es möglich extrem günstig und sehr effektiv Servos mittels des DCC1andere Protokolle werden auch unterstützt – die habe ich aber nicht getestet. Protokolls zu steuern.
Der Weg dahin ist allerdings etwas steiniger als nur LEDs anzusteuern. Vielleicht kann ich euch trotzdem die Angst nehmen – ich habe nämlich keinen blassen Dunst von Elektronik. Aber außer Löten und ein wenig Basiswissen (z.B. wo bei LEDs Plus und Minuspol ist oder das man Kondensatoren immer richtig gepolt einbauen muss), braucht ihr keine Elektronikkennnisse!
Was sind DCC Servodecoder?
Mit Servos kann man auf der Moba richtig viel anstellen – siehe dazu auch meinen Bericht im Technikkapitel. Dort hatte ich auch eine Liste zusammengestellt, was denn nun ein Decoder – also das Modul mit dem die Servos mittels DCC Kommandos angesteuert werden – leisten sollte:
Der Antrieb muss einfach programmierbar sein ohne mühsam unter die Anlage zu klettern und erst ein Programmiergleis anzuschliessen.
Die Ausfallwahrscheinlichkeit sollte so gering wie möglich sein.
Die Verbindungsleitungen sollten gegen Störungen abgesichert sein
Der Antrieb muss günstig sein da er auch in grossen Mengen eingesetzt werden soll.
Der Decoder sollte für die Servos eine eigenständige Stromversorgung bereitstellen, ohne dass dafür teuerer Digitalstrom verwendet wird.
Weichenherzpolarisierung muss als Option zwingend vorhanden sein.
Mit einer einzelnen Platine kann man mittels DCC Kommandos insgesamt 3 Servos ansteuern. In Nächternhausen wollte ich diese zunächst für die Tore meines Ringlokschuppens verwenden.
Die Bausteine – eigentlich müsste ich eher sagen die Servoplatinen – werden an die MobaLEDLib Hauptplatine genauso angeschlossen wie auch eine RGB LED, also mittels eines einfachen Pfostensteckers. Beim Einsatz als Weichenantrieb ist zu beachten, das die Servoplatinen keine Herzstückpolarisierung besitzen. Zur Polarisierung kann man eine Relaisplatine verwenden2das wird aber wohl wieder ein eigenständiges Projekt werden – aktuell verwende ich die MobaLEDLib nur für die Servos und LEDs.
Als erstes benötigt ihr natürlich die Bauteile – und da hatte ich schon meine ersten Probleme, weil manche Teile nicht lieferbar waren. Aber eigentlich war das kein Problem. Doch der Reihe nach:
Komponenten
Die Ansteuerung der Servoplatine erfolgt über die Hauptplatine. Normalerweise wird diese kaum direkt dort angeschlossen werden, sondern über eine Verteilerplatine. Und dann braucht ihr natürlich noch einen oder mehrere handelsübliche Servos.
Die Servoplatine hat einen eigenen Mikroprozessor – einen Attiny. Um diesen zu Programmieren benötigt ihr einmalig eine Programmierplatine und einen Arduino Uno – wobei letztere beiden Komponenten nicht unbedingt erforderlich sind (s.u.).
Zusammenbau und Bestellung
Der Zusammenbau ist wie immer gut auf im MobaLEDLib Wiki beschrieben. Allerdings hätte ich vielleicht besser erst alles bis zum Schluss durchlesen sollen:
Die Erweiterung der Hauptplatine um zusätzliche LED und Taster ist nicht erforderlich.
Tatsächlich dient diese Erweiterung nur dazu, wenn man die Servos später ohne Programmunterstützung einstellen will. Das wird aber nur in den seltensten Fällen der Fall sein. Die Servos sind ja – genauso wie die Hauptplatine – nachher irgendwo unter der Anlage verbaut – wer will da von der Hauptplatine unter der Anlage die Servos über der Anlage einstellen?
Tatsächlich gibt es natürlich Anwendungsfälle, wo man auf dem Schreibtisch alles zusammenbaut – aber dann hat man in der Regel auch einen PC vor Ort.
Im Grunde benötigt ihr nur die Servoplatine 510 , allerdings: auf der Servoplatine ist ein kleiner Mikroprozessor – ein s.g. ATTINY. Und den kann man nur über eine Programmierplatine programmieren. 3Wenn ihr genau wisst, das ihr nur eine bestimmte, kleine Anzahl an Servos benötigt dann könnt ihr auch einen anderen Anwender fragen, ob er euch den ATTINY programmiert.
Einmalig braucht ihr also noch eine Programmierplatine in der Bauvariante 1 4die Variante 2 ist nur erforderlich wenn ihr tief in die Elektronik einsteigen wollt und eigene Attiny Steuerungen prorammieren wollt – den Attiny-Programmer 400. Diese Platine funktioniert allerdings nicht von alleine – sondern benötigt einen Arduino UNO R35(ein Arduino Uno DIP2 komaptibles R3 Board in der DIP Variante mit ATmega328 und USB) – den man günstig in China oder für ca. 13-15€ auch bei Reichelt erhält
Bestellung
Im folgenden setze ich voraus, das ihr bereits die Hauptplatine im Einsatz habt und vielleicht auch schon eine Verteilerplatine.
Die Bestellkomponenten für die Servoplatine und die Programmierplatine sind auf dem MobaLedLib Wiki detailliert beschrieben – schaut dort unter 510 – Servomodul nach, sowie unter 400 Attiny Programmer. Dabei bitte folgendes bei der Bestellung beachten:
Servoplatine: Es gibt bei der Servoplatine alternativ für den WS2811 die SOP Bauform6U3 in der Bestellliste. Verwendet aber stattdessen die DIP Bauform7U2 in der Bestellliste, welche leider nur schwierig zu bekommen ist. Deshalb könnt ihr diese WS2811 in DIP bei Alfred zusammen mit den Platinen bestellen!
Servoplatine: Stiftleiste SV3 und SV4 benötigst du nur wenn du vor Ort mehr als 3 Servos schalten willst. Dann kann man die Servoplatinen miteinander verbinden. Das würde ich aber nicht empfehlen, sondern generell eher einen Verteiler oder Miniverteiler verwenden. Der Vorteil ist, das ihr damit wesentlich flexibler seid, da ihr jede Servoplatine einheitlich bauen könnt und flexibel verkabeln könnt.
Attiny Programmer: Ich hatte echt Probleme bei Reichelt die LED zu bekommen die auf dem Programmer sind. Tatsächlich habe ich diese einfach weggelassen – für die Programmierung selbst sind diese nicht wirklich erforderlich – wartet halt beim Programmieren bis ihr sicher seid, das es abgeschlossen ist.
Erweiterung für die Hauptplatine: Unter diesem Link steht, das man die Hauptplatine zur Einstellung der Servos verwenden kann. Betonung liegt aber auf „kann“ – es ist nicht wirklich erforderlich. Hätte ich mal vorher genau lesen sollen. Braucht man also nicht wirklich.
Arduino Uno: Den muss man einfach nur fertig bestellen (siehe Hinweis weiter oben)
Bau des Programmers
Das funktioniert genau so wie in der Beschreibung dargestellt. Hier nochmal die Abfolge:
Attiny Programmerplatine zusammenlöten
Arduino Software um den Uno und Attiny erweitern
Programmierplatine auf den Uno stecken
Attiny auf die Programmierplatine stecken
Attiny programmieren
Attiny von der Programmierplatine auf die Servoplatine umstecken
Servo programmieren (siehe unten)
Einwandfrei beschrieben wie das funktioniert hat Moba Jo in diesem Video – danach war es selbst für mich ein leichtes den Attiny zu programmieren:
Bau der Servoplatine
Auch das ist einwandfrei beschrieben – was mir nicht so ganz klar war: Solange man die Servoplatinen nicht direkt untereinander sondern über Verteilerplatinen anschliesst, muss man zwingend jede Servoplatine terminieren indem man die Lötbrücke TERM verbindet!
Servo programmieren
Vorbereitung
Das obige Video zeigt wie es funktioniert. Bevor ihr mit der Programmierung anfangt, solltet ihr die Bibliotheken allerdings auf den aktuellen Stand bringen – bei mir war das Version 3.0.0 (die Version steht in der Excel rechts oben).
Der Update funktioniert so, das ihr den Programmgenerator startet – dann auf Optionen gehen und auf Update. Dort „Installiere Betatest“ – das war für mich etwas verwirrend weil da Betatest steht – tatsächlich wird aber die wirklich neueste Version installiert (dazu musste ich dann auch erst mal im Forum nachfragen wie das funktioniert).
Beim Anschließen der Servos ist folgende Nomenklatur zu beachten:
Servo 1
Innen – in der Excel hat der Servo die Nummer 0
Servo 2
Mitte – in der Excel hat der Servo die Nummer 1
Servo 3
Aussen – in der Excel hat der Servo die Nummer 2
Das Massekabel des Servos muss zum Attiny hin zeigen – bei Futaba, Conrad und Robbe ist es schwarz, bei Graupner, JR und den meisten Noname Servos ist es braun. Der Stecker hier an dem Pfeil sitzt auf Position 0 – also der 1. Servo:
Mobaledlib Anschluss Servo
Für die Servoverteilung eignet sich ein Miniverteiler8 (der kommt in der neuesten Version der Hauptplatine mit). Solltet ihr den Miniverteiler verwenden, so denkt daran, das dieser keine Pins für die Terminierung hat. Zur Terminierung müsst ihr die entsprechenden Pins wie auf diesem Bild verwenden.
Vielleicht war es auch meine eigene Dummheit, aber ihr solltet auch darauf achten, das ihr die Kabelverbindungen selbst richtig aufsteckt – hier nochmal als Gedankenstütze.
Programmierung
Die Programmierung ist ebenfalls oben im Video gut beschrieben. Einfach über Optionen den „LED Farbtest starten„9auch wenn das gar nichts hier mit dem Farbtest zu tun hat. Dann den Reiter „Servos“ auswählen.
Die Einstellung der Servoauslenkung erfolgt am PC – während der Servo selbst dann meist schon am Einbauort fest installiert ist
Genau das kann manchmal ein Problem werden! Aber hier hilft es wenn euer PC mit dem Internet verbunden ist und ihr ein Smartphone oder noch besser einen Laptop oder Tablet habt. Macht dann einfach eine Videokonferenz mit eurem Tablet (einfach einen anderen Benutzer wählen als Einwahl), gebt euren Bildschirm und die Steuerung (!) frei. Schon könnt ihr die Einstellungen auf eurem mobilen Endgerät direkt am Ort des Geschehens vornehmen.
Allerdings hatte ich das Problem, das zwei der drei Servos nur sehr schwerfällig, bzw. gar nicht auf die Eingaben in der Servoeinstellung reagiert hatten.
Ich hatte vom Miniverteiler zum Hauptverteiler ein 2m langes Kabel verwendet. In der Dokumentation findet sich der Hinweis, das man in solchen Fällen (>1.5m Kabellänge) zusätzliche Spannungsversorgungen legen sollte. Stattdessen habe ich – nur zur Programmierung – kürzere Kabel verwendet. Danach hatte ich auch keine Probleme.
Bei der Programmierung über den Programmgenerator wird der jeweilige Attiny programmiert – nicht der Arduino! Deshalb ist der spätere Steckplatz des Servos – also an welcher Stelle er in der Excel adressiert wird – für die Programmierung selbst nicht von Belang. Im Excel selbst daher einfach nur Servo auswählen – und lasst euch nicht davon irritieren, das im Kommentarfeld dann ganz andere Werte stehen:
Excelauszug MobaLEDLIB mit Servos
Beachtet die drei Zeilen ab Adresse 751: Hier wird dann immer Servo2 ausgewählt.
Ergebnis
In Nächternhausen habe ich die Servos zunächst dazu benutzt um die Tore meines Rundlokschuppens zu öffnen und zu schließen wie ihr auf diesem Video sehen könnt:
Falls ihr euch interessiert wie das asynchrone Öffnen und die Positionierung der Servos realisiert wurde, dann schaut euch bitte diesen Beitrag an: „Tore mit Servos öffnen„.
Was nun meine Wunschliste anbelangt, so ist alles erfüllt – bis auf die Herzstückpolarisierung.
Welchen PC man für die Steuerung verwenden sollte? Kommt drauf an – so wäre jetzt meine normale Antwort. Ich gebe zu dass dies nicht sehr hilfreich ist, deshalb versuche ich es mal hier etwas zu differenzieren.
Warum überhaupt ein PC?
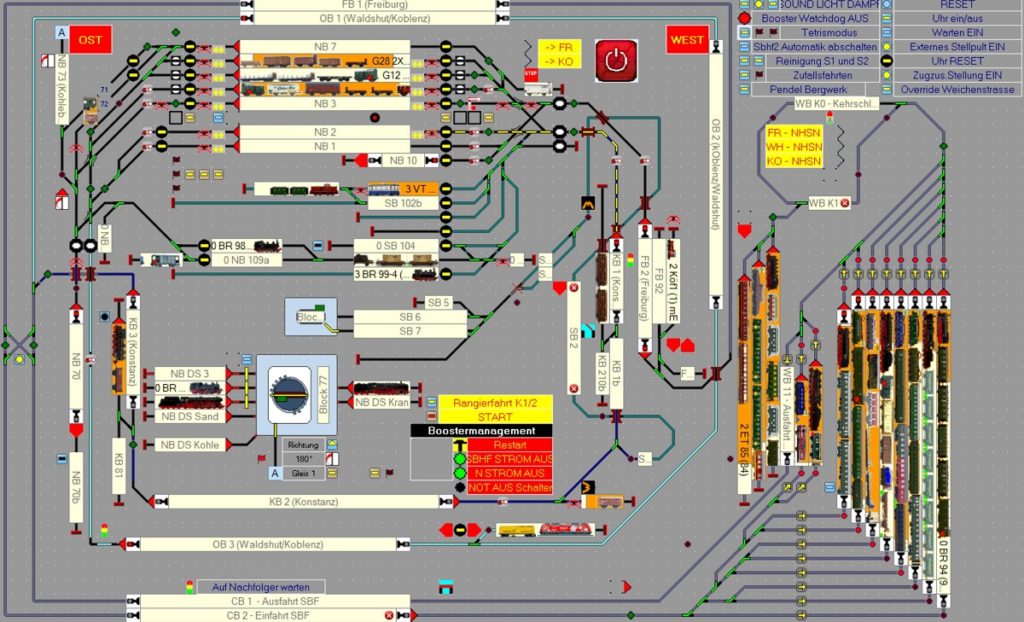
Diese Frage hört man oft in Foren und unter Modelleisenbahnern. Schließlich kann man auch ohne PC die Züge automatisch steuern. Für mich war aber nicht die automatische Steuerung entscheidend für die Vorteile einer PC Steuerung, sondern die schier unendlichen Möglichkeiten, die sich mit dem PC ergeben. Wo ich früher ein großes Stellpult benötigte um alle Weichen zu schalten, Schalter für jedes Signal und jedes abschaltbare Gleis, da benötigt es heute nur noch einen Monitor und die entsprechende Software. Das sieht bei mir aktuell so aus:
Stellpult – Traincontroller
Das hatte ich früher mal alles mühsam mit Schaltern erstellt – heute ist das um so viel einfacher. Alle belegten Bereiche sind orange hinterlegt 1das hier nicht alle orange sind hat nur damit zu tun, das ich das Bild am Arbeits-PC mit einem Simulator erstellt habe. In jedem Bereich (aka „Block“) sieht man nicht nur welcher Zugverband dort steht, sondern auch aus welchen Wagen er gebildet ist. Gelb sieht man oben gerade eine aktive Weichenstraße. Die hier zur Verwendung kommende Software ist Traincontroller.
Welche Funktionen für den PC? Laptop oder Desktop?
Wer mit der Modelleisenbahn anfängt, für den reicht am Anfang auch ein ganz normaler Standard-Laptop. Aber spätestens wenn die Anlage Gestalt annimmt und größer wird, stellt man fest, das der Laptop nicht ausreichend ist. Hier mal eine Liste dessen was mein PC aktuell leisten muss:
So viel USB Anschlüsse wie möglich. HSI-11, Intellibox, Tams Redbox, Brand Drehscheibensteuerung, 4 WebCams für den Schattenbahnhof, USB Keyboard, USB Maus, MobaLEDLib-Programmierung Arduino 1, IR Einstellung Arduino 2, Traincontroller Dongle, Backup USB Laufwerk . Richtig – das sind alleine schon 15 USB Anschlüsse. Tatsächlich schafft das nicht einmal ein normaler Desktop-PC der zwischen 6-8 USB Anschlüsse besitzt.
Verwendet auf jeden Fall einen externen USB Hub mit eigener Stromversorgung. Nur so könnt ihr die Anzahl der Anschlüsse problemlos erhöhen.2 Ein Kollege hatte letztens das Problem, das er einen PC mit 100 USBs benötigte und dachte das wäre kein Problem, weil Microsoft Windows 255 Anschlüsse unterstützt. Tatsächlich ist aber bei schon 44 Anschlüssen Schluss. Nur noch Industrie-PCs kommen über 44 Anschlüsse!
Videokarten und Audiokarten sind nicht erforderlich – diese kann man ggfs. auch später noch nachrüsten. Erst jetzt habe ich den PC um eine Soundkarte erweitert um mittels 4D Sound auch Geräusche auf die Anlage zu bringen – aber das ist ein anderes Projekt 🙂
Internes oder externes CD ROM Laufwerk. Gerade die kleineren Hersteller liefern Software immer noch auf CD aus – auch wenn der Download inzwischen fast Standard ist. Ein externes USB Laufwerk hat den Vorteil, das man es auch anderweitig benutzen kann – vor allem aber könnt ihr das externe Laufwerk direkt in euer Stellpult einbauen.
Fast alle Desktop PCs (wobei das Teil eher unter der Anlage stehen sollte), haben im BIOS die Möglichkeit den PC einzuschalten sobald die Stromversorgung eingeschaltet ist. Das macht es wesentlich einfacher den PC irgendwo zu platzieren – der Hauptschalter des PC wird bei mir nur ganz selten benötigt. Das setzt aber voraus, das wir den 220V Anschluß von unserem „Arbeitsplatz“ einschalten können (siehe dazu das obige Bild).
Einen Netzwerkanschluss hat heute jeder Desktop. Außerdem haben viele Zentralen heute einen Netzwerkanschluss – dazu kommen dann noch Netzwerkkameras usw. usw. Weiter unten habe ich im Kapitel Netzwerk beschrieben was deshalb noch zusätzlich zum PC benötigt wird.
PC Arbeitsplatz
Damit kommen wir zu einem weiteren Thema: Dem PC Arbeitsplatz. Meine Anlage steht in 120 cm Höhe relativ hoch (man wird ja auch nicht jünger). Deshalb ist ein übersichtlicher Arbeitsplatz erforderlich. Wie man auf dem Bild sieht habe ich mir deshalb 2 Hochstühle angeschafft und verwende ein günstiges Billy Regal eines bekannten schwedischen Möbelhauses um darauf die Füße bequem abstellen zu können:
Stellpult Nächternhausen
Nicht gerade wunderschön – aber das Redesign steht schon auf der ToDo Liste :?.
Den PC seht ihr hier nicht – der steht hinter dem „Regal“. Lautstärke ist für unseren Bahn-PC kein Problem – also benötigen wir auch keine ultra-leisen Lüfter, keine gedämmten Innenplatten und auch keinen Einbauschrank.
Monitor und Maus
Wer sich obiges Bild genau anschaut, wird feststellen, das ich eine ganz normale, schnur-gebundene Maus verwende, die mit einem USB Kabel angeschlossen ist. Eine schnurlose wäre sicher auch möglich gewesen. Relevant sind aber die Monitore. Hier kommt ein 19“ und ein etwas größerer 20“ Monitor zum Einsatz.
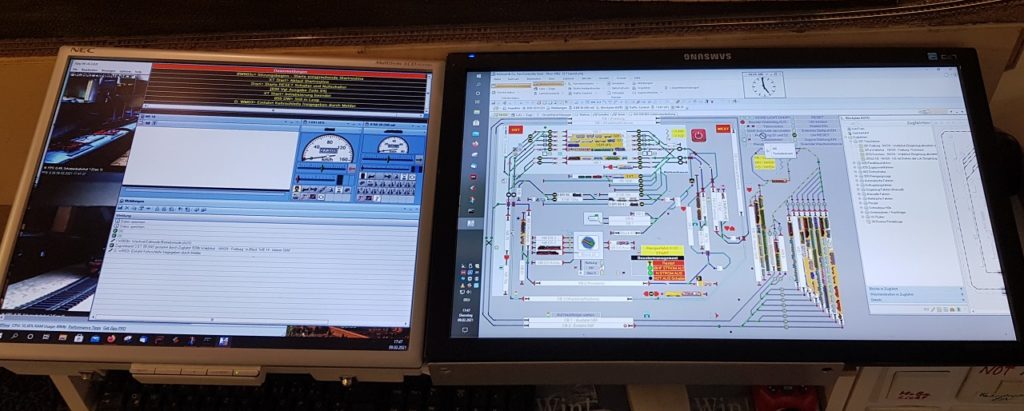
Warum eigentlich 2 Monitore? Dazu ein Bild mal in der Übersicht eines typischen Einsatztages mit der Moba:
Monitor Modelleisenbahn
Auf dem größeren Monitor sehen wir das aktive Stellpult. Weichen, Licht und alle manuellen Fahrten werden hierüber geschaltet. Außerdem sieht man noch rechts das Fenster für die zu startenden Zugfahrten. Ein weiteres „Window“ dient auf dem linken Monitor für Prio2-Aktivitäten: Meldungen werden hier angezeigt, aber auch die Steuerung der Loks (normalerweise steuere ich nicht mit dem PC sondern mit der Roco Multimaus). Und das Bild mit dem Schattenbahnhof ist hier schon total verdeckt – da wäre dann auch ein 3. Monitor durchaus von Vorteil 3letztens sah ich einen solchen 3. Monitor rechts oben unter die Decke gehängt – dort wurden die Schattenbahnhöfe angezeigt. Durchaus von Vorteil wenn man den Platz dafür hat.
Eigentlich muss man sagen: Je größer (oder besser: je länger), umso besser. Tatsächlich habe ich aber mit 2 Monitoren bessere Erfahrungen gemacht – insbesondere da manche Moba-Software mit den hohen Auflösungen großer Monitore oftmals nicht wirklich klar kommt. Zwar kann man dies in den Einstellungen ändern, aber letztlich war es immer relativ viel Aufwand mit dem Versuch eines großen Monitors.
Achtet beim Monitor darauf, das man den Standfuß abschrauben kann – für das Arbeiten mit dem Monitor ist ein senkrecht stehender Monitor nur in den seltensten Fällen praktikabel!
Irgendwann werde ich mir die Mühe machen und einen Touchpad-Monitor anschaffen – angeblich funktionieren die wirklich gut mit Traincontroller. Für diejenigen, die einen Touchpad zu Hause haben: Es gibt auch Möglichkeiten diesen als 2. oder 3. Bildschirm zu verwenden und auf diese Weise sich selbst einen Touchscreen zu bauen.
PC Leistungsklasse
Das ist die schwierigste Frage und die Antwort hängt vor allem von der Anlagengröße und der verwendeten Software ab. Meine Empfehlung:
Die meisten Hersteller von Steuerungssoftware haben Empfehlungen für die PC Leistungsklasse.
In Nächternhausen verwende ich einen günstigen Desktop PC mit Intel i3 CPU und 8 GB Memory. Eine interne 100 GB Disk reicht vollständig aus – ich würde aber eine SSD empfehlen.
PC Einstellungen und zusätzliche Hardware
Es gibt einige sinnvolle Einstellungen, welche mir das Leben einfacher gemacht haben – hier mal eine Übersicht:
Gönnt dem PC einen eigenen Ein/Ausschalter (220V). Das kann z.B. über einen gesonderten Schalter oder eine schaltbare Steckdosenleiste erfolgen.
Im BIOS eines PC kann man festlegen, das dieser hochfährt, sobald der Strom eingeschaltet ist. Der Vorteil ist, das der PC nicht direkt vom Stellpult aus erreichbar sein muss und man jedes Mal im Untergrund den PC-Schalter suchen muss. 4ihr müsst später eh nur noch selten direkt an den PC Im Bild oben seht ihr einen solchen extra PC-Schalter am Stellpult.
Eine SSD beschleunigt das Starten und Herunterfahren – wenn ihr zusätzlich Funktionen wie den Windows Schnellstart oder FastBoot nutzt, ist das schneller als das Booten aus dem Ruhezustand5es gibt im Netz diverse Hinweise den Schnellstart bei SSDs nicht zu nutzen weil dabei eine hohe Schreiblast auf die SSD geht – tatsächlich ist die Schreiblast bei einem MobaPC allerdings so gering, das ihr definitiv nicht an die SSD Grenzen kommt.
Netzwerktechnik
Es gibt immer noch Modellbahner, die meinen das ein Moba-PC keinen Internetanschluss benötigt! Das ist Quatsch und falsch verstandene Sicherheitsbedenken. Deshalb mal kurz ein Plädoyer für die Anbindung eines PC ans Internet (und nicht nur an das lokale Netzwerk (aka LAN) zuhause.
Auch ein MobaPC sollte Verbindung zum Internet haben.
Der Grund: Ein Moba PC lebt von vielen Softwarekomponenten – nicht nur der Steuerungssoftware wie z.B. Traincontroller. Und diese Softwarekomponenten müssen aktualisiert werden. Dazu kommt, das immer mehr Zentralen, Netzwerkkameras, usw. über das lokale Netzwerk mit dem PC kommunizieren und natürlich ebenfalls ihre Updates aus dem Internet beziehen.
Software
Hört sich einfach an, ist es aber leider nicht. Hier mal eine Übersicht der Software die sich inzwischen auf dem Moba-PC angesammelt hat:
Microsoft Excel – zur Verwaltung meiner Moba-Artikel. Auch die Liste aller DCC Adressen verwalte ich mit Excel. Ist günstig und hilft auch bei der Fehlersuche
Die „Freiwald-Suite“ – Traincontroller, Trainanimator und Trainprogrammer
iSpy für die Kameraüberwachung und Darstellung (kostenlos – zeigt alle WebCams im Schattenbahnhof sehr übersichtlich an.
Virenscanner
Datensicherungsprogramm zum Backup auf eine USB Festplatte
Synchronisationsprogramm „AllwaySync“
Arduino und MobLEDLib Bibliothek
Software zur Drehscheibensteuerung
Software zur Programmierung der TAMS Redbox
Mailprogramm für ausgehende Mails 6vornehmlich um Fehlermeldungen zu senden. Eingehende Mails sollte man nicht erlauben.
Problemfelder
Ein alter Kollege meinte einmal: „Software ist böse“ – und damit hat er nicht so ganz unrecht. Im Laufe der Jahre habe ich mit dem Moba-PC durchaus auch böse Überraschungen erlebt. Deshalb hier mal einige wichtige Punkte:
PC hängt
Bestimmt habt ihr das auch schon mal erlebt: Plötzlich ist mitten in der Arbeit die Sanduhr zu sehen. Wenn einem das mit Excel oder Powerpoint passiert, wartet man eine Minute und meist geht es dann wieder. Aber in dieser einen Minute hat unsere PC Steuerung keine Verbindung mehr zur Anlage oder reagiert extrem langsam auf Änderungen auf der Anlage – was die Folge sein kann brauche ich wohl nicht zu erzählen. Wie man das Problem löst habe ich in einem gesonderten Beitrag beschrieben – ihr findet diesen unter dem Namen „Software Watchdog für Traincontroller“. In der Regel funktioniert das dortige Verfahren auch mit anderen Steuerungsprogrammen
Windows Updates
Microsoft Windows ist leider kein Realtime-Betriebssystem. Das bedeutet, das Windows mit vielen USB Schnittstellen und Treibern von kleinen, unbekannten Herstellern so seine Probleme hat.
Mir hat es bei einem größeren Windows-Update die USB Schnittstelle einer Zentrale (Uhlenbrock Intellibox Basic) vollständig zerlegt. Der Grund war ein nicht zertifizierter Treiber der mit dem Update nicht mehr erlaubt war und der deshalb durch einen Standardtreiber ersetzt wurde – leider hat es in dem Wirrwar dann auch noch die USB Kennung der Zentrale überschrieben.
Vor einem größeren Windows Upgrade empfiehlt es sich alle USB Anschlüsse abzustecken
Das gilt nur für größere Windows Upgrades – also nicht die kleineren „Up-Dates“.
USB Einstellungen
Im Gerätemanager unter Anschlüsse -> Energieverwaltung den Haken bei dem Wert „Computer kann das Gerät ausschalten, um Energie zu sparen“ rausnehmen. Das hat mir einigen Ärger erspart mit COM Schnittstellen die ab und an mal nicht funktionierten.
USB Kabel
Mal abgesehen davon, das es diverse USB Stecker gibt, haben diese auch noch technische Besonderheiten wie USB 1.1. oder nur USB 3.0 usw. Ich will mal hier nicht in die Details gehen – wer sich dafür interessiert findet eine gute Darstellung im Elektronik-Kompendium.
Wenn ein USB Anschluss nicht funktioniert – einfach mal ein anderes USB Kabel verwenden
Es gibt hochwertige Kabel welche für den aktuellen USB 3.1 Standard auch unterstützt sind. Ich habe für solche Zwecke ein solches Extra Kabel in der Werkstatt.
USB ist bis 5m Länge spezifiziert – das heisst nicht das es nicht auch länger geht und auf der Moba sind 5m schnell erreicht. Wenn ihr über diesen Wert kommt schaut euch die Beschreibung im Elektronik-Kompendium an.
Wenn eine USB Anschluss jahrelang und dann – ohne ersichtlichen Grund – nicht mehr funktioniert: Tauscht einfach mal das Kabel aus.
Es gibt natürlich noch viel, viel mehr Möglichkeiten den PC optimal auszustatten und unendlich viel mehr Fehlermöglichkeiten. Ich habe hier nur die genannt, mit denen ich mich selbst mal auseinandersetzen musste.
Wie funktioniert das eigentlich mit den Haltmeldern und woran erkennt der PC, daß der Zug am Ziel angekommen ist?
Lange Zeit hatte ich keine befriedigende Antwort auf diese Frage – ich hoffe ich kann mit diesem Beitrag etwas Licht ins Dunkel bringen falls ihr euch ähnliche Fragen stellt.
Meldung an den PC – der S88 Bus
Der PC muss irgendwie die Daten von der Anlage erhalten und das funktioniert über eine Elektronik die an den PC entweder über Netzwerkkabel oder USB Anschluss angeschlossen ist. Im Technikbereich hatte ich das mal grob bei der Verkabelung dargestellt:
Typische Stromversorgung einer digitalen Modelleisenbahn
In diesem Bild sehen wir rechts einen „S88 Stromfühler“ – im Unterschied dazu verwendet man bei 3-Leiter einen „S88 Massefühler“. Wer sich für die Unterschiede zwischen Massefühler und Stromfühler interessiert der sei auf die Seiten von Digital-Bahn verwiesen. Beides sind Meldebausteine für den S88 Bus. In Nächternhausen verwende ich die Produkte der Firma Littfinski – vornehmlich den RM-GB-8-N.
Zum S88 Bus gibt es diverse Beschreibungen im Netz – von daher erspare ich mir das mal hier. Denn eigentlich ging es ja um folgendes:
Punktgenaues Halten mit einem Stromfühler
Ein Stromfühler misst den Spannungsabfall, der durch einen Motor, eine Lampe oder einen Widerstand zwischen den Gleisen (=Polen) entsteht sobald in dem überwachten Bereich ein entsprechender Verbraucher entdeckt wird.
Da haben wir schon das erste Problem: Wie wird eigentlich ein Verbraucher (Lok, Wagen etc) entdeckt?
Das passiert indem die erste Achse im überwachten Bereich angekommen ist. Hier schon das erste Problem: Wenn der vorherige Abschnitt nicht überwacht wurde, dann überbrückt unser Verbraucher den Überwachungsbereich. Deshalb benötigen wir in obigem Bild die entsprechenden Dioden. Diese Dioden müssen identisch sein wie die Dioden die im Stromfühler verbaut sind! Litfinski hat das in einem Beispieldokument hier beschrieben
Eine PC Steuerungssoftware kann nun aus der Geschwindigkeit der Lok, einer in der Software definierten Bremsrampe und dem Abstand zwischen erster gemeldeter Achse und Anfang der Lok punktgenau den Zug halten lassen.
Im Prinzip!
Denn leider funktioniert das nur unter Idealbedingungen, die da lauten:
Die ersten Meldeachsen der Lok müssen absolut sauber sein – sonst wird nämlich nicht die erste, sondern die zweite Achse als vermeintlich erste von der Software interpretiert – die paar Zentimeter fährt dann unsere Lok aber zuweit.
Die Loks sollten genauestens eingemessen sein – wie dies funktioniert beschreiben die Hersteller der PC Software. Dazu gibt es auch diverse Einträge in diversen Foren.
Die ersten Achsen sollten keine Haftreifen besitzen – wenn doch führt dies zu absolut nicht interpretierbaren Ergebnissen.
Warme Motoren verhalten sich anders als kalte Motoren – die Loks sollten also schon entsprechend eingefahren sein.
Die Gleise müssen absolut sauber sein und auch sauber verlegt sein – insbesondere im Trennbereich.
Und dann gibt es da noch diverse Herstellerunterschiede. Meine alten Fleischmann-Loks muß ich nach mehreren Stunden einfach nochmal neu einmessen.
Punktgenaues Halten funktioniert auch mit Rückmeldemodulen welche auf Stromfühler-Basis arbeiten – allerdings müssen diverse Rahmenbedingungen erfüllt sein.
Beim Bau meiner Drehscheibe hatte ich damit erstmals Probleme – vor allem mit langen Loks von 27cm die gerade noch so auf eine 30cm Scheibe passen! Daher musste hier was neues her.
Punktgenaues Halten mittels Infrarotmeldern
Wer kennt nicht die vielen Bewegungsmelder die für uns abends das Licht anmachen oder uns die Tür öffnen wenn wir davor stehen.
Die dahinter liegende Technik basiert im Prinzip darauf, das ein Lichtstrahl erzeugt wird (aus dem nicht sichtbaren, infraroten, Spektrum). Wenn dieser Lichtstrahl von einem Objekt reflektiert wird (weil es sich im Bereich des Lichtstrahls befindet), so erkennt dies ein Lichtdetektor an einem Empfänger des Geräts.
Wie cool wenn man nun diesen technischen Ablauf auch für die Modelleisenbahn nutzen könnte – und ja: Das geht! Und zwar nicht nur sehr gut, sondern auch sehr günstig!!
Leider sind die bisherigen Verfahren relativ teuer gewesen. So hatte ich anfangs in Nächternhausen zwei IR Module von Softlok (REFLIS) im Einsatz. Mit 22€ pro Stück allerdings eine ziemlich teure Lösung. Im Stummiforum wurde ich auf den Bausatz einer Arduino-basierten Lösung aufmerksam – hier kostet das gesamte Modul ca. 20€ und acht Lichtschranken sind schon mit dabei.
Ich verwende dazu Infrarotmelder welche direkt an den S88 Bus melden. Details zu den Meldern, deren Zusammenbau und wo man die Platinen dafür bekommt findet ihr in diesem PDF im Downloadbereich
Hier mal ein versteckter Melder im Drehscheibenbereich:
Infrarotmelder im Prellbock
Im Prellbock versteckt ist der Melder kaum auszumachen. Nähert sich nun eine Lok dem Melder, so wird dieser entsprechend auslösen und über den S88 Bus eine Information an den PC geben. Dieser stoppt dann die Lok auf der Bühne sofort. Der Einstellbereich ab wann der IR-Melder auslöst ist dabei variabel. Bis 10cm habe ich gute Erfahrungen gemacht.
Unser Schaltbild sieht damit jetzt so aus:
Stromversorgung Modelleisenbahn mit S88 Bus und IR Melder
Der S88 Infrarotmelder wird dabei einfach in den S88 Bus eingeschleift – hier das entsprechende Bild von der Anlage. Je Melder können bis zu acht Melder über ein dreipoliges Kabel angeschlossen werden. Bei der Programmierung bitte mein PDF Dokument im Downloadbereich beachten.
Seit dem Einbau des Melders hatte ich keinen einzigen Unfall mehr auf der Bühne in diesem Bereich.Optimal wäre hier einen Melder gegenüber jedem Gleis zu haben – aber leider haben die meisten Gleise im Drehscheibenbereich gegenüberliegend ebenfalls ein Gleis.
Nutzung von IR Meldern
Aber man kann mittels IR Meldern noch viel mehr machen! Hier mal ein paar Beispiele:
Verwendung als Gleisbelegtmelder. Dabei arbeitet der Melder wie ein normaler Massemelder. In der Steuerungssoftware kann dann der entsprechende Block als belegt gemeldet werden.
Verwendung zur Fahrterkennung. Wenn man mehrere Züge hintereinander aufreihen will, so würde ein Zug bereits den Strommelder auslösen und der zugeordnete Block wäre belegt. Mit einem IR Melder kann die Steuerungssoftware erkennen das ein 2. Zug in den Block einfährt und diesen hinter dem vorhandenen Zug aufreihen. Das gleiche Verfahren kommt zum Einsatz wenn man in Traincontroller einen Zug zusammenkuppeln will – auch hier wird die Zuglok die in den Block einfährt anhand des IR Melders erkannt.
Für die letztgenannte Funktion hier ein Bild der Weichenstraße von Nächternhausen:
IR Melder – Weichenstrasse
Wer findet die IR Melder alle? Hier hilft eine Nachtaufnahme welche auch das von den Infrarotmeldern ausgestrahlte Licht sichtbar macht:
IR Melder Weichenstrasse – Nachts
Hier sieht man jetzt die 3 Lichtschranken jeweils innerhalb der Weiche vorne, im Gleis und hinten in der DKW. Sobald ein Zug über den Melder steht und die Weiche in die richtige Richtung des jeweiligen Blocks zeigt, erkennt die PC Software, das hier ein Zug an einen vorhandenen Zug angekuppelt wird und steuert die Zusammenstellung. Dies ist wichtig um nachher die richtige Zuglänge im Schattenbahnhof zu verwenden – das Chaos wäre sonst vorprogrammiert wenn zu lange Züge in zu kurzen Blöcken halten.
In Nächternhausen gibt es einen zweiten, kleineren Schattenbahnhof. Auch hier wäre eine Lichtschranke ideal gewesen, aber der abzudeckende Bereich von drei Gleisen ist dann doch etwas zu viel für eine Lichtschranke. Deshalb kam hier eine Lösung mittels Schutzgasrohrkontakten (SRKs) zum Einsatz.
SRKs sind Schalter welche bei Annäherung eins Magneten auf Kontakt schalten. Diese SRKs habe ich nun auf eine Platte geklebt und parallel mit Masse verschaltet. Die Masse wiederum meldet an einen S88 Massemelder:
Meldung mit Schutzgasrohrkontakten
Im Bild sieht man hinten den Ausschnitt für die SRKs. Die Brücke im Vordergrund hält weisse Kartonstreifen welche hinten jeweils einen Magneten angeklebt haben. Fährt nun ein Zug langsam in Richtung des Kartonstreifens, so drückt er diesen in Richtung des SRK der daraufhin schaltet. Der PC erkennt dies, stoppt den einfahrenden Zug und fährt den Zug ein kleines Stück wieder vor, sodaß der Karton wieder entlastet ist und der SRK für das nächste Gleis melden kann. Die Streifen sind übrigens ganz einfach mittels einer Gewindestange befestigt:
Meldung mit SRK – Befestigung
Das sieht zwar jetzt etwas „rudimentär“ aus, verrichtet aber seit vielen Jahren klaglos seinen Dienst!
Kennt ihr das auch? Man will einfach nur mal wieder Betrieb machen und eigentlich lief doch alles gut – aber dann 👿
Heute hatte ich mal wieder so ein Fall: Eine Roco 03 – die Variante mit dem Touropazug. Läuft seit vielen Jahren einwandfrei und dreht in Nächternhausen ihre Runden. Aber dann: Entgleisung mitten im Untergrund auf der Weiche die natürlich am wenigsten zugänglich ist
Die Weiche hatte ich natürlich als erste in Verdacht. Bestimmt irgendein Zurüstteil welches sich in der Weiche verhakt hatte. War aber nicht so.
Dann mal mit anderen Loks probiert – keine hatte Probleme!
Also ist es die 03.
Falsches Radsatzinnenmaß ist häufig ein Grund für Entgleisungen
Und so war es auch: Das Innenmaß sollte 14.3 mm betragen – war aber auf 2 Antriebsachsen auf 14.4 mm. Wer glaubt das dies nichts ausmacht irrt leider. 1/10 mm kann gewaltig was ausmachen! Also die Räder auf 14.3 reduziert (wohl dem der einen Schraubstock hat) und versucht der Sache auf den Grund zu gehen.
Das Problem: Die Räder sind auf der Achse nur aufgesteckt. Und leider sind die Räder aus Kunststoff was mit der Zeit dazu führen kann, das die Räder sich leicht auf der Achse verschieben lassen. Da reicht ein Verkanten in einem Radlenker dann schon aus um das Rad auf der Achse zu verschieben sodaß unser Innenmaß im Eimer ist!
Die Lösung: Natürlich wird unsere Schnelllösung mit dem Schraubstock das Innenmaß anzupassen nur kurz funktionieren. Nur ein Verkanten irgendwo und die Räder sind wieder ausserhalb unseres Zielwertes.
Ideal wäre jetzt einen neuen Satz Räder beim Hersteller als Ersatzteile zu ordern. Würde ich dann auch irgendwann machen wenn meine Notlösung nicht mehr funktioniert – und die sieht so aus:
Die Räder werden auf das erforderlich Innenmaß eingestellt und dann wird mit einem Zahnstocher vorsichtig Sekundenkleber zwischen Achse und Rad gegeben. Dabei nicht zu viel Sekundenkleber verwenden! Und auch wenn es „Sekunden“kleber heisst: Lasst es trotzdem mal über Nacht liegen.
Am nächsten Tag baut ihr die Räder wieder ein – und: Die Lok bewegt sich gar nicht mehr!
Der Grund hierfür liegt darin, das die Antriebsräder leider überhaupt kein Spiel im Lager haben – da hilft dann nur den überstehenden Sekundenkleber mit Alkohol und Cutter zu entfernen.
Dafür läuft meine 03 jetzt wieder einwandfrei.
Leider ist die Qualität der Loks im Laufe der Zeit nicht besser geworden. Eine 58er aus dem Jahre 1988 hatte noch nie damit Probleme – die 03 aus dem gleichen Hause (Roco) von 2007 leider schon
Views: 0
Translate »
Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.OKNeinDatenschutzerklärung